defiant_prototyp_3_rad_v2_iic.jpg
Hochgeladen am 27.7.2008, 20:25 von Defiant. 4 / 5
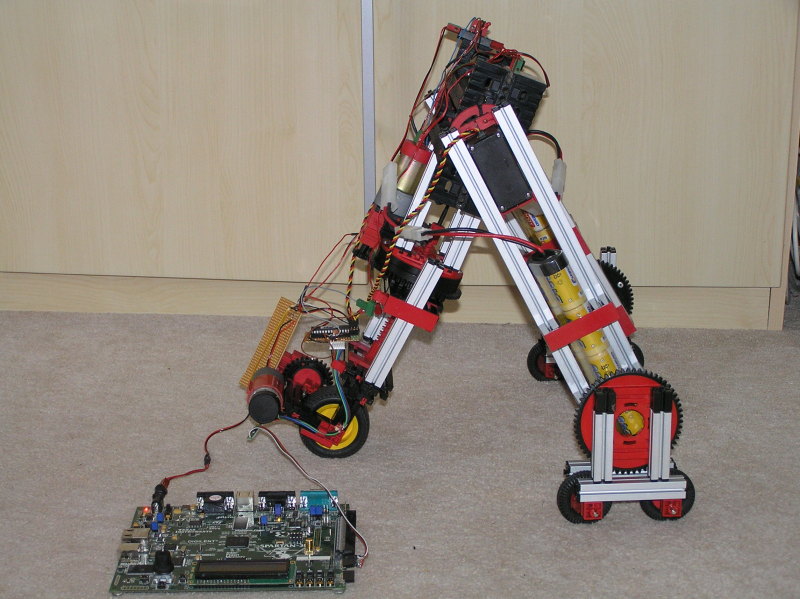
Die ft Gummireifen haben jetzt schon unter dem Gewicht nachgegeben. Also habe ich sie ausgetauscht gegen die älteren Reifen aus dem Start 100.
Die Steuerung, ein Spartan3e FPGA mit Microblaze softcore, gibt jetzt die Position für die Servos über I2C vor.
Die Servos sind leider schon jetzt ziemlich beschäftigt.
kehrblech (27.7.2008, 21:04:33)
Wofür brauchst du überhaupt die Servos? Kannst das Rad mit dem langsamen Motor nicht in der Mitte zwischen den anderen Rädern einbauen und nur mit der Schnecke anheben? Dadurch würde die ganze Konstruktion leichter werden.
Gruß Jan
Defiant (27.7.2008, 21:35:57)
Die schönen Drehkränze mussten leider erstmal raus, da ich sie nicht mit den Servos verbinden konnte. Aber keine Sorge, die Drehkränze kommen wieder. Ist nur eine Frage der Zeit…
Der komplette Aufbau ist sowieso noch recht provisorisch…
Defiant (27.7.2008, 21:39:00)
Kehrblech: Zwischen den beiden anderen hat der dritte Motor dann aber keine Kraft um das Gestell zu bewegen. Außerdem ist das so stabiler.
Der Sinn ist übrigens auch noch das ganze Modell etwas schräger stellen zu können.
Ma-gi-er (31.7.2008, 17:02:41)
Irgendwie erinnert mich dieser Prototyp an einen (ich glaube der heisst so) R2D2 aus StarWars.