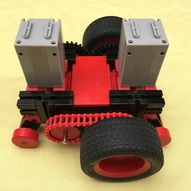
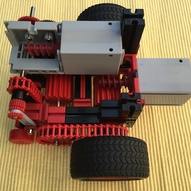
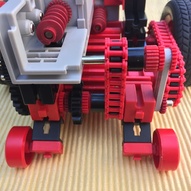
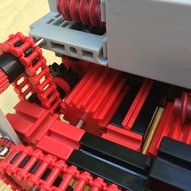
Mobiler Roboter mit Gleichlaufgetriebe (uffi)
Gleichlaufgetriebe mit den alten grauen M-Motoren und den alten roten Differential-Getrieben als Fahrgestell für einen mobilen Roboter. Die Übersetzung ist allerdings grenzwertig groß, er ist sehr schnell. Damit die Motoren gut anlaufen, braucht man eine Spannung > 8V. Ich habs mit LiPo-2S-Zellen (8,4V) getestet, damit geht es gut. Ist aber nichts für feine Positionierungen.
In dieser Galerie gibt es 7 Bilder: