The drive part - 2
Hochgeladen am 12.5.2013, 16:50 von winijenh. 6 / 10
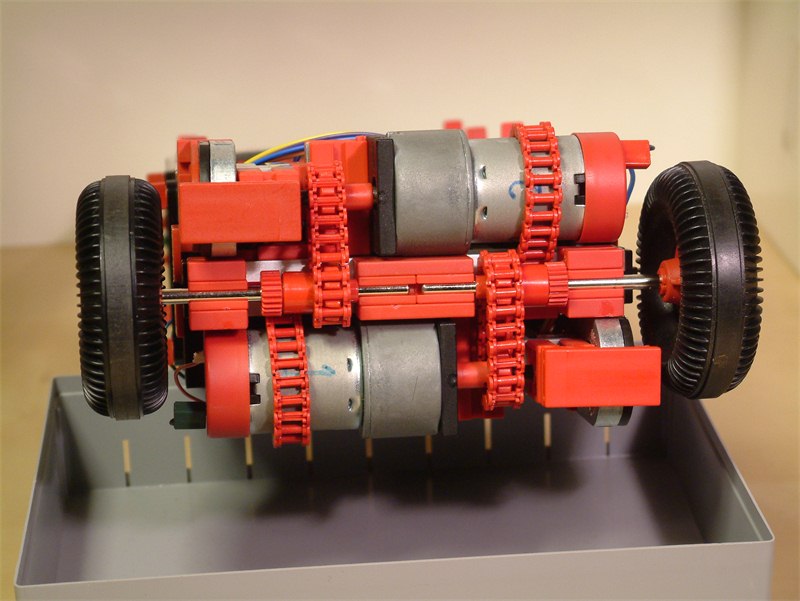
Having the motors off the central axis, means that power needs to be transfered to the central axes. Gear wheels are not good because of the slack they create. In a balancing robot that jitters a lot, slack is bad. Also rast axles and rast connectors are not stiff enough for the fairly significant forces that the 1:50 power motors can create. The solution was a good old chain. With a lot of trial and error a construction was found that has just the right distance between the gears for a chain of certain length to fit without too much slack. The result doesn’t get the price for elegant looks, but it proved to be a very sturdy, reliable solution. Once built, it run for hundreds of hours, and I never had to look at it again.