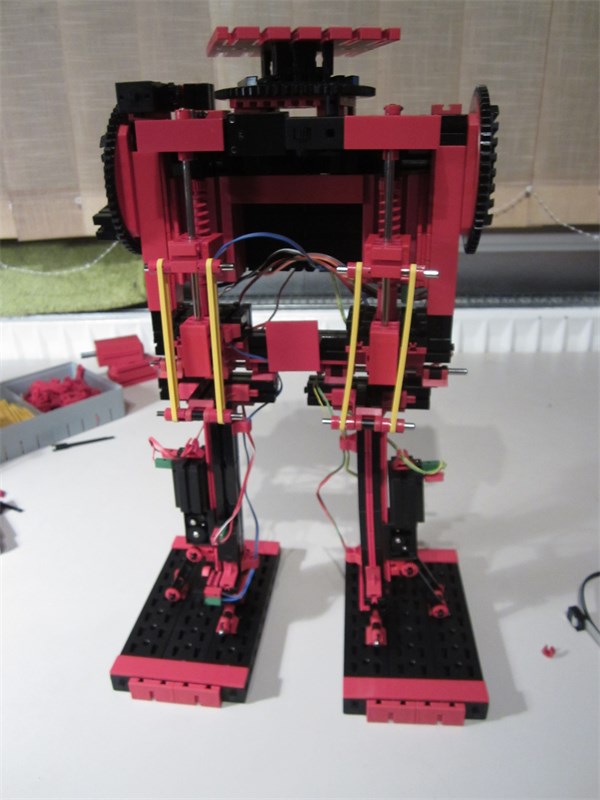
Samurai Roboter von vorne
Hochgeladen am 15.11.2015, 19:54 von DirkW. 1 / 6
Hallo zusammen,
hier ein Versuch den Samurai Roboter von 2003 weiter zu automatisieren. Leider ist der Versuch gescheitert, da dieser zu “Kopflastig” geworden ist. :-(
Die Beine sollten mit Hilfe von 2 Encoder-Motoren angehoben werden. Die Füße, wie in der Bauanleitung, über 2 S-Moteren mit Hubgetriebe.
Pdf-Download: http://www.fischertechnik-museum.ch/museum/displayimage.php?album=72&pos=77
geometer (16.11.2015, 12:52:23)
Der Samurai ist ein sehr schönes Modell. Kennst Du die Variante, die Elektrolutz öfter auf Ausstellungen präsentiert hat? Die müsste sich eigentlich im Bilderpool finden - zumindest bei den Ausstellungen in und um Münster.
Viele Grüße
Thomas
DirkW (16.11.2015, 16:34:24)
Hallo Thomas,
die Bilder habe ich gefunden, danke für deine Info. :-)
Stimmt Elektrolutz hatte wohl das gleiche Problem wie ich. Die Encoder-Motoren sind einfach zu schwach.
Gruß Dirk
peterholland (16.11.2015, 18:00:37)
Ein sehr gutes Altertaniv ist eine EMG30 - Getriebemotor mit Drehgeber:
http://www.exp-tech.de/robotik/servos-motoren/emg30-getriebemotor-mit-drehgeber
http://www.robot-electronics.co.uk/htm/emg30.htm
The EGM30 is a 12v motor fully equipped with encoders and a 30:1 reduction gearbox. It is ideal for small or medium robotic applications, providing cost effective drive and feedback for the user.
Specification: •Rated voltage 12v •Rated torque 1.5kg/cm •Rated speed 170rpm •Rated current 530mA •No load speed 216 •No load current 150mA •Stall current 2.5A •Rated output 4.22W •Encoder counts per drive shaft turn 360