fischertechnik 6-Achsen Roboterarm RS 816
Hallo Technikfreunde,
hiermit möchte ich euch meinen 6-Achsen Roboterarm RS 816 vorstellen.
Ziel war es einen technisch voll funktionsfähigen Roboterarm zu konstruieren, welcher den orignalen Roboterarm in Aussehen und Funktionen in nichts nachsteht. Es wurde dabei Wert auf Stabilität der Arme, module Komponenten und erweiterbar Sensorik gelegt. Der 6-Achsen Roboterarm besteht aus 6-Achsen und einem Greifer.
Ein Video dazu unter YouTube:
https://www.youtube.com/watch?v=OdPd-DBR3cE
ft:pedia Artikel unter 01/2021:
https://ftcommunity.de/ftpedia/2021/2021-1/ftpedia-2021-1.pdf
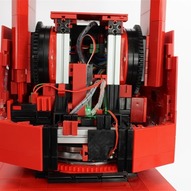
Folgende Bauteile wurden verbaut, auf diese Bauteile werde ich in den folgenden Bildern näher eingehen. Durch den Einsatz des ftPwrDrive konnte auf einen zweiten TXT Controller verzichtet werden.
Controller: 1 TXT Controller angesteuert über W-LAN 1 ftPwrDrive über I2C und 1 ftExtender verbunden
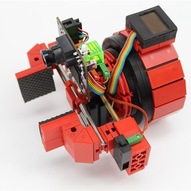
Antriebe: 4 Nema 14 Stepper für das Drehen des Grundkörpers, Drehen und Heben des Arms, 2 Nema 17 Stepper für das Heben und Senken 2 ft Encoder Motoren für das Drehen und Heben des Greiferkopfs
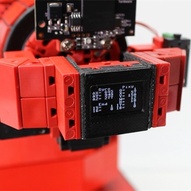
Anzeige: 1 OLED-Display
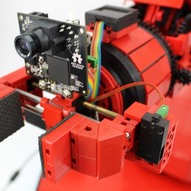
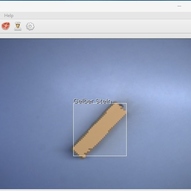
Sensoren: 1 Pixy-Kamera für die Bilderkennung 1 ft Kombisensor für die Lageerkennung des Kopfs
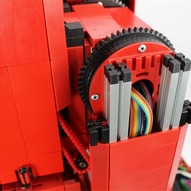
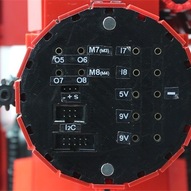
Kopf: 2 Step-Down Module zum reduzieren der Spannung auf 5 und 3,3 Volt 1 S-Motor für den Greifer 360 Grad Kopf Buchsen: Über Schleifring, I2C, Stromversorgung, 3,3Volt, 5 Volt, 9 Volt, 1 Servoansteuerung (ftpwrDrive)
Rumpf: 360 Grad Stromversorgung und Not-Aus Taster
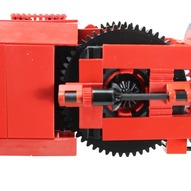
Lagerung 5 Drehkränze mit Kugellager für Rumpf, Arme und Kopf
Schalter 6 Endschalter 1 Not-Aus Taster
Statik: 12 Alu-Profile in den Rumpf, Armen
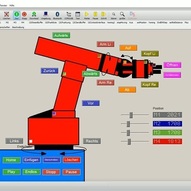
Software: ROBO Pro Software Ansteuerung über TeachIn Programm
Hallo Technikfreunde,
hiermit möchte ich euch meinen 6-Achsen Roboterarm RS 816 vorstellen.
Ziel war es einen technisch voll funktionsfähigen Roboterarm zu konstruieren, welcher den orignalen Roboterarm in Aussehen und Funktionen in nichts nachsteht. Es wurde dabei Wert auf Stabilität der Arme, module Komponenten und erweiterbar Sensorik gelegt. Der 6-Achsen Roboterarm besteht aus 6-Achsen und einem Greifer.
Ein Video dazu unter YouTube:
https://www.youtube.com/watch?v=OdPd-DBR3cE
ft:pedia Artikel unter 01/2021:
https://ftcommunity.de/ftpedia/2021/2021-1/ftpedia-2021-1.pdf
Folgende Bauteile wurden verbaut, auf diese Bauteile werde ich in den folgenden Bildern näher eingehen. Durch den Einsatz des ftPwrDrive konnte auf einen zweiten TXT Controller verzichtet werden.
Controller: 1 TXT Controller angesteuert über W-LAN 1 ftPwrDrive über I2C und 1 ftExtender verbunden
Antriebe: 4 Nema 14 Stepper für das Drehen des Grundkörpers, Drehen und Heben des Arms, 2 Nema 17 Stepper für das Heben und Senken 2 ft Encoder Motoren für das Drehen und Heben des Greiferkopfs
Anzeige: 1 OLED-Display
Sensoren: 1 Pixy-Kamera für die Bilderkennung 1 ft Kombisensor für die Lageerkennung des Kopfs
Kopf: 2 Step-Down Module zum reduzieren der Spannung auf 5 und 3,3 Volt 1 S-Motor für den Greifer 360 Grad Kopf Buchsen: Über Schleifring, I2C, Stromversorgung, 3,3Volt, 5 Volt, 9 Volt, 1 Servoansteuerung (ftpwrDrive)
Rumpf: 360 Grad Stromversorgung und Not-Aus Taster
Lagerung 5 Drehkränze mit Kugellager für Rumpf, Arme und Kopf
Schalter 6 Endschalter 1 Not-Aus Taster
Statik: 12 Alu-Profile in den Rumpf, Armen
Software: ROBO Pro Software Ansteuerung über TeachIn Programm
In dieser Galerie gibt es 55 Bilder: