kopf (genauer) (alte Version)
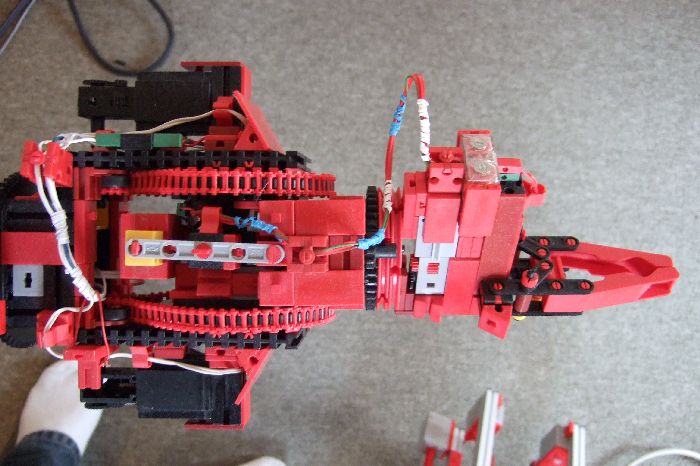
Hochgeladen am 6.4.2009, 10:07 von manuMFfilms. 8 / 16
Schlagworte: Roboter, Roboterarm, 6-achsig.
heiko (6.4.2009, 16:06:47)
Wenn Du einen Saugnapf oder bloß einen Elektromagneten benutzt statt des Greifers, dann hast Du schonmal ein Werkzeug, das auch auf einem schwächeren Arm arbeiten kann. Wenn Du dann noch stabile Drehkränze benutzt, reicht an der fünften Achse evtl. ein einziger. Dann kannst Du die Achse #6 insgesamt zurückziehen, so dass sie nach hinten über den Drehkranz hinausragt. Das senkt das Drehmoment an Achse 5, so dass dort ein einziger Motor reichen sollte.
Und immer so weiter, bis zum Sockel …