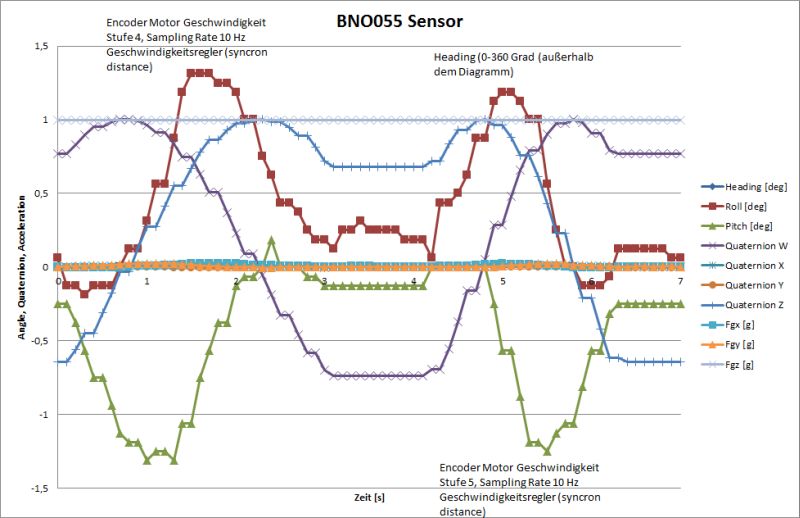
BNO055 some Sensor data like Quaternions, Heading, Roll, Pitch and Acceleration
Hochgeladen am 13.2.2016, 21:30 von chehr. 9 / 10
Schlagworte: BNO055, Sensor, Quaternions, Heading, Roll, Pitch, Acceleration.
Objective: I2C MPU driver optimization wrt user needs. Setup: Encodermotor with Turning table and lever arm. The Sensor BNO055 is located at the outer position with a lever arm of approx. 17cm. Table is rotated firstly by +360° afterwards by -360° with two different speed.
BNO055 Sensor data has been recorded (not all) Issues: Accurate sampling rate Data transfer capacity