[1/5] BF1-2-RI, Modellanlage
Hochgeladen am 30.3.2009, 20:09 von Udo2. 1 / 5
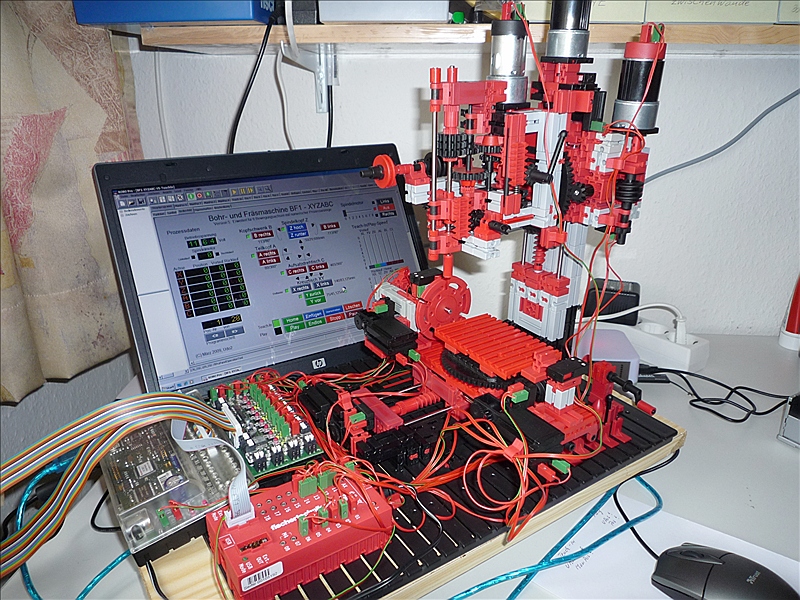
Die Modellanlage der Bohr- und Fräsmaschine BF1 in der Etappe 2 als BF1-2-RI mit der Technik-Generation ROBO Interface. Das Modell in der Etappe 1 hatte ausser der Arbeitsspindel noch Handkurbeln und ist jetzt mit 7 Motoren ausgestattet. Es wird nun von einer 6+1-Achsen-Steuerung bewegt. Die Verkabelung ist noch als “Versuchsfeld” provisorisch mit Festlängen aus den Baukästen ausgeführt. Die aufklappbare Kopfverkleidung wurde hier mal abgenommen zur optischen Freisetzung der Antriebsmechanik an der Säule. Nachtrag 31.03.2009: BF1 mit Handkurbeln - Vorstellung von Aufbau und Zubehör http://www.ftcommunity.de/details.php?image_id=15967
Stefan Falk (30.3.2009, 21:15:58)
Das sieht ganz schön komplex und beeindruckend aus, Respekt. Planst Du, damit tatsächlich Werkstücke zu bearbeiten?
Gruß, Stefan
Udo2 (30.3.2009, 22:25:20)
Hallo Stefan, wenn du mich so öffentlich fragst, kann ich ja nicht mehr schwindeln. Das Steuerprogramm kann es schon. Mal sehen, was die 3. Etappe bringen wird … Sie kann jedenfalls wesentllich länger als die 2. sein, die ich alle zeitlichen Unterbrechungen mal abgezogen in knapp 4 Wochen schaffen konnte. Vorweg, es wird nur der ft-Statik gerechtes Material sein können. Bei der Geometrie sehe ich allerdings weite Grenzen. Gruss, Ingo