Präzisionsplotter 1
Hochgeladen am 21.2.2012, 18:03 von StefanL. 1 / 16
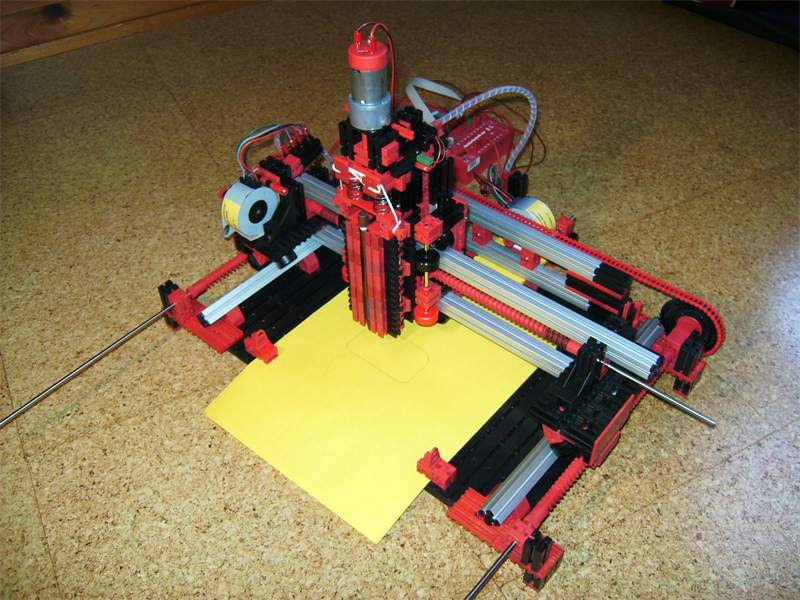
Die Genauigkeit beträgt dank Schrittmotoren, Schneckenantrieb und 1:4 Übersetzung 0,0123 mm (12,3 µm). Dadurch ist er leider sehr langsam. Das Spiel konnte ich auf ein Minimum reduzieren, zusätzlich habe ich noch einen Spielausgleich programmiert. Erste Plots sehen auf jeden Fall schon mal sehr vielversprechend aus.
Udo2 (24.2.2012, 10:47:21)
Hallo Stefan, und wieder eine weitere Bereicherung der ft-Modelle mit deinem Präzi-Plotter. Die Plotts überzeugen. Gratulation! Bresenham läßt mit welcher Steuersoftware grüßen? Die Auflösung beträgt 4,71/(48x4)=0,0245mm? Gruß, Udo2
StefanL (24.2.2012, 12:11:54)
Hallo Udo, danke für deinen Kommentar, im Halbschrittmodus sind es 96 Schritte für eine Umdrehung, bei der Schneckensteigung kam ich auf 4,734mm. Die Auflösung beträgt dann 4,734/(96x4) = 0,0123mm. Ich verwende den Bresenham Algorithmus von Holger Howey kombiniert mit dem Schrittmotor-Treiber von Alfred Svabenicky. Gruß Stefan
Udo2 (24.2.2012, 19:38:04)
Hallo Stefan, wußte natürlich nicht, daß du im Halbschrittmodus arbeitest. Die Algorithmen von Holger und Alfred sind mir ja nicht unbekannt. Die Schneckensteigung berechnet sich mit Modul x Pi = 4,712 mm. Das Messen ist hier bei der ft-Schnecke so eine Sache, die ich lieber umgehe. Du wirst aber hier sicher im Download-Modus arbeiten. Obwohl es von mir mal mit Programmen von dir vor längerer Zeit getestet auch ab und an mal stolperte. Das könnte aber dann unter Last evtl. nicht der Fall sein. Gruß Udo2