Plotter 3
Hochgeladen am 9.12.2007, 13:33 von StefanL. 3 / 18
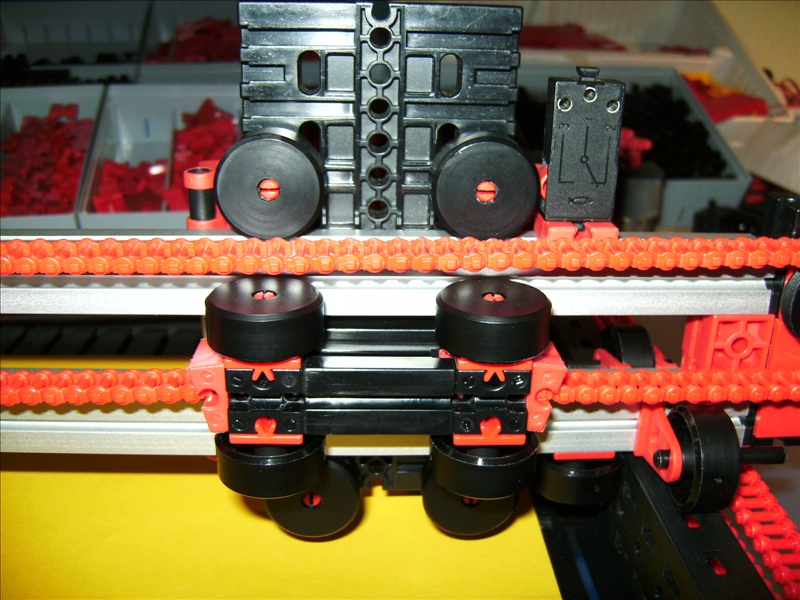
Die Führung ist absolut Spielfrei.
schnaggels (10.12.2007, 16:15:51)
Zusammen mit der hohen Untersetzung sollte die Auflösung recht hoch werden - wir sind gespannt :)
remadus (10.12.2007, 19:45:39)
Die Konstruktion kann sich sehen lassen.
Kleiner Wermutstropfen sind die ft-Ketten, die mit einer Positionsgenauigkeit besser 0,2 mm überfordert sind. Bei solchen Auflösungen macht sich deren Gummiweichheit bemerkbar.
Schönen Gruß
Udo2 (26.2.2008, 11:43:03)
Hallo, die rechnerische Schrittgenauigkeit des Plotters beträgt 0,078mm/Schritt. Die Übersetzung 4:1 ergibt mit Z1=10Z und Z2=40Z 4x48=192 Schritte/U. Die Kette läuft auf Z3=10Z etwa im Teilkreis. Der Teilkreisumfang beträgt 10Zxm1,5=15mm. Das ergibt 15mm geteilt durch 192 Schritte/U 0,078mm/Schritt. Gruss Udo2
Udo2 (26.2.2008, 12:04:39)
Hallo, da habe ich noch was vergessen. Mit der verfügbaren Taktung 10ms sind günstigenfalls 2 Schrittmotorumdrehungen/s möglich. Das macht einen Linearweg für X und Y mit 4:1 sowie Z3=10Z von 30mm/s. Wegen der Problematik der Taktsynchronität über Windows laufen die ft-Schrittmotoren nur ordentlich rund(Drehfeld) mit dem RoboPro-Interface und downgeloadetem Steuerprogramm oder langsam mit einem alten DOS-Computer und compiliertem Programm. Leider … Gruss Udo2
Udo2 (26.2.2008, 14:48:17)
Hallo, verflixt noch mal, wer ist schon vollkommen. Bei 2U/s des Schrittmotors und einer Übersetzung 4:1 machen Z2 und Z3 0,5U/s. Das wären 15/2=7,5mm/s. Zum 10ms-Raster und der max. Drehzahl eines ft-Schrittmotors mit dem Robo-Interface hab ich nochmal nachgehakt. Mal sehen wie die Antwort von kompetenter Stelle ausfällt. Gruss Udo2
Udo2 (29.2.2008, 15:31:33)
Hallo nochmal, zur Beantwortung der Fragestellung nach der Drehzahl des Motors kann zu aktuellen Beprobungsergebnissen unter www.ftcomputing.de/steprobo.htm nachgelesen werden. Nochmals, an der Leistung von Stefan Lehnerer mit seinem Plotter gibt es keine Abstriche. Sie verdient hohe Anerkennung. Im Ergebnis der Beprobung von Ulrich Müller des Motors im Leerlauf kann bei der vorliegenden Konfiguration der Steuerung Robo-Interface mit Robo I/O Extension im Download-Betrieb von einer erreichbaren Drehzahl 3,46 U/s = 208 U/min ausgegangen werden. Der Durchzug der Schrittmotoren wird durch die vorliegende Übersetzung 4:1 (kräftemäßig ca. 3:1) dabei unterstützt. Mit der vorliegenden Antriebs- und Steuerkonzeption dürfte der Plotter eine Schrittgenauigkeit(rechnerisch) von 0,078 mm sowie eine Lineargeschwindigkeit X und Y von 12,975 mm/s = 77,85 cm/min erreichen. Arbeiten beide Schrittmotoren gleichzeitig, ist die tangentiale Punktgeschwindigkeit der gefahrenen Hypothenuse aus den X- und Y-Katheten höher. Sie beträgt z.B. bei gleicher geschwindigkeit 12,975 mm/s der beiden Achsen dann 18,349 mm/s. Das kann man im Flash zum Plotter sehr schön beobachten. Gruß Udo2
Stefan Falk (29.2.2008, 16:54:15)
Deshalb hatten gute Stiftplotter auch eine Steuerung, die a) je nach verwendeter Stiftart (Tusche/Filz) und b) unabhängig von der Zeichenrichtung immer eine bestimmte feste Geschwindigkeit fuhren. Von ein paar HP-Plottern weiß ich, dass sogar die Beschleunigung der Stiftart angepasst wurde. Da steckte richtig viel Firmwareaufwand dahinter.
Gruß, Stefan