Antrieb und Endlagentaster I
Hochgeladen am 16.10.2011, 23:09 von Dirk Fox. 3 / 14
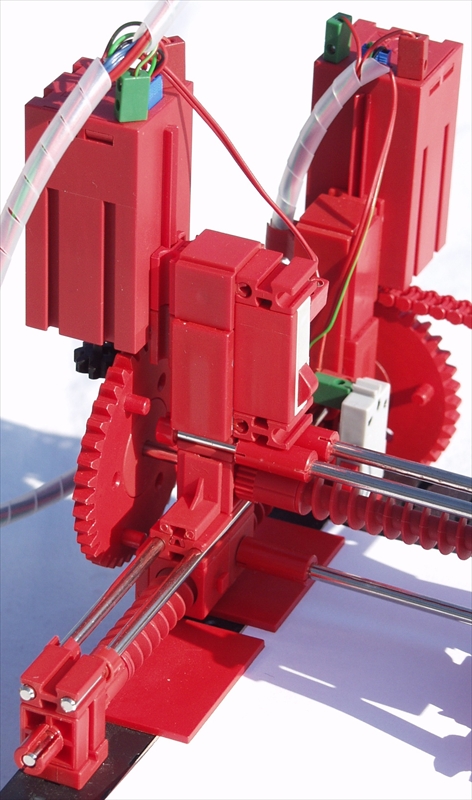
Die Schneckengetriebe werden von zwei senkrecht montierten Encoder-Motoren mit Rast-Ritzel Z10 angetrieben, die jeweils ein Z40 als Kronrad nutzen (10:32). Daraus errechnet sich die Auflösung wie folgt: 75 Impulse des Encoder-Motors (je Umdrehung)/10*32 = 240 Impulse je Umdrehung des Schneckengewindes, das entspricht 0,5 cm Translation der Schneckenmutter, also liegt die Auflösung bei 0,0208 mm je Impuls. Das ist sogar etwas besser als die Default-Auflösung von HP-Plottern (1/1016’’ = 0,025 mm). Die Endlagenschalter werden nur bei der Initialisierung des Plotters abgefragt (die “Home Position” des Plotters nach HP-GL Rev. C ist die linke obere Ecke der Zeichenfläche).
Stefan Falk (16.10.2011, 23:36:47)
Dirk erwähnte grad im Chat, dass das Schneckenmutterspiel weg ist, wenn man wie hier im Adleraugenmodus sichtbar die Muttern 90° verdreht. Da ich das für ein nützliches Detail halte, bin ich mal so frei und poste das hier.
Noch doller finde ich aber das Aufsetzen der Achsverbindung auf dem runten Zapfen der Schneckenmutter! Coooool.
Gruß, Stefan
Udo2 (17.10.2011, 15:44:59)
Hallo Dirk, das Modell ist zweifellos ideenreich und insgesamt gelungen. Wir wollen aber nicht vergessen, daß die oben angegebene Auflösung von 0,0208 mm je Impuls “nur” eine rechnerische ist. Damit diese zum Tragen käme, müßte das Gesamtsystem um eine Kommastelle bzw. Zehnerpotenz genauer sein. Wenn man sich die Lagerung der M-Achsen z.B. anschaut, erkennt man wo die etwa liegt. Sobald du ein Zeichenprogramm dazu hast, wirst du z.B. bei 3x mit verschiedenen Farben übereinander gezeichneten Zeichnungen die tatsächliche Genauigkeit erkennen. Zum Stift selbst solltest du dir eine andere Lösung einfallen lassen, die sich z.B in der Strichstärke nicht verändert. Ich drücke dir dazu die Damen. Gruß, Ingo
Dirk Fox (17.10.2011, 23:02:37)
Hallo Ingo, Du hast recht - die Ansteuerungsgenauigkeit ist erstmal theoretisch. Zumindest “Verformungsspiel” hat die Konstruktion in jedem Fall, denn fischertechnik ist einfach “weich”. Aber ich war selbst überrascht, wie viel Spiel ich ohne Alu’s und mit relativ wenigen Bausteinen herauskonstruieren konnte. Der Stift ist zugegebenermaßen “unterirdisch” - aber es war der kleinste Bleistift, den ich hatte, und wir haben sehr viele davon - von Bahn- und Flugreisen, Weltspartagen und anderen ähnlichen Anlässen… Fineliner verlaufen bei den (trotz Bresenham) relativ langsamen Kreisalgorithmen, und Kugelschreiber sind zu plump (und schmieren). Hast Du eine bessere Idee? Gruß, Dirk
Dirk Fox (18.10.2011, 08:38:58)
… ok, habe nicht ordentlich nachgesehen: Du hast ja unter den Fotos zu Deinem Portalroboter einen Stifte-Tipp (http://www.ftcommunity.de/details.php?image_id=28075). Werde ich einmal ausprobieren. Gruß, Dirk
Udo2 (18.10.2011, 14:50:21)
Hallo Dirk, ft-Teile werden allgemein mit Zapfen und Nut im elastischen Bereich ihrer Belastbarkeit montiert um das Prinzip der Wiederholbarkeit zu gewähren. Verbindungen mit Belastung im plastischen Bereich würden zu bleibenden Verformungen und damit zum baldigen Ausfall der Verbinderfunktionen führen. Damit hat das ft-System stets eine Restelastizität, die sich in den Modellen entsprechend bemerkbar macht. Dennoch hat ft im Vergleich zu LEGO-Technik eine höhere Stabilität. LEGO-Modelle sind vergleichsweise so laprig, dass man beim Händeln oft nicht weiß wo man sie anpacken soll. Gruß, Ingo