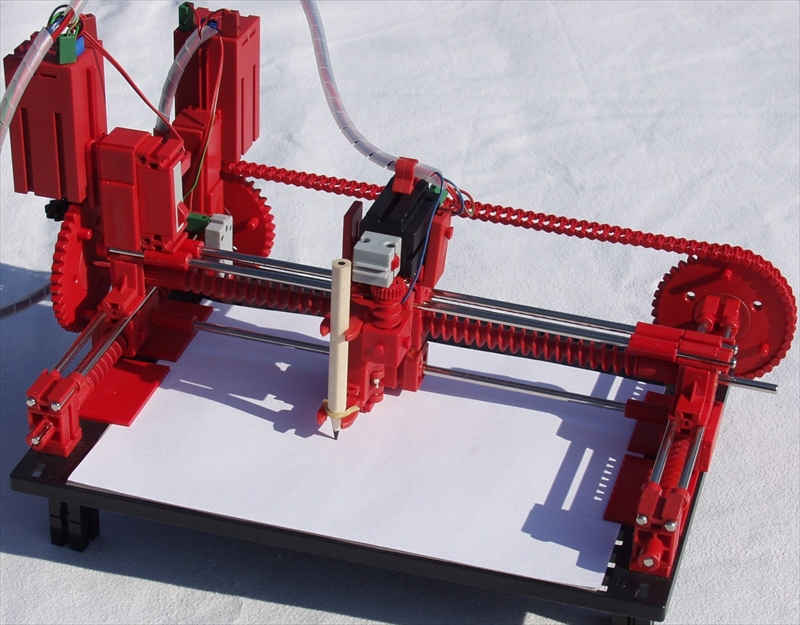
Gesamtansicht des Plotters
Hochgeladen am 16.10.2011, 23:09 von Dirk Fox. 1 / 14
Schreibkopf und Schlitten des Plotters werden über insgesamt drei Schneckengetriebe positioniert. Dank jeweils zwei miteinander verbundenen benachbarten Schneckenmuttern (um 90° verdreht) ist die Konstruktion vollständig spielfrei. Die Metallstangen sorgen für eine leichte und gerade Führung von Schlitten und Schreibkopf.
RoboMaster (17.10.2011, 17:03:28)
Sieht echt toll aus hast du gut gebaut. Hast du auch schon ein Program dazu geschrieben? Wenn ja: -Was kannst du mit dem Plotter schon alles machen? -Wie sieht das Ergebnis aus? Gruß RoboMaster
Dirk Fox (17.10.2011, 23:11:28)
Hallo RoboMaster,
ja, ein RoboPro-Programm gibt es auch dafür. Es realisiert die wichtigsten HP-GL-Befehle als Unterprogramme (absoluter und relativer “Plot”, Pen Up, Pen Down, Kreis, Rechteck). Derzeit optimiere ich noch ein wenig an der Bresenham-Implementierung, dann stelle ich es online.
Die Endfassung des Programms wird eine HP-GL-Plot-Datei als .csv-Datei einlesen und plotten können. Dazu muss ich derzeit noch vorab eine (manuelle) Konvertierung vornehmen, weil RoboPro in .csv-Dateien nur Zahlen akzeptiert; die HP-GL-Kommandos muss ich daher erst durch Ziffern ersetzen und in ein RoboPro-verträgliches Format bringen, bevor mein RoboPro-Programm die Plot-Datei auswerten kann. Später soll diese Umformatierung ein kleines Filter-Programm (.exe) übernehmen… Dann sollte man jede HP-GL-Datei plotten können.
Gruß, Dirk