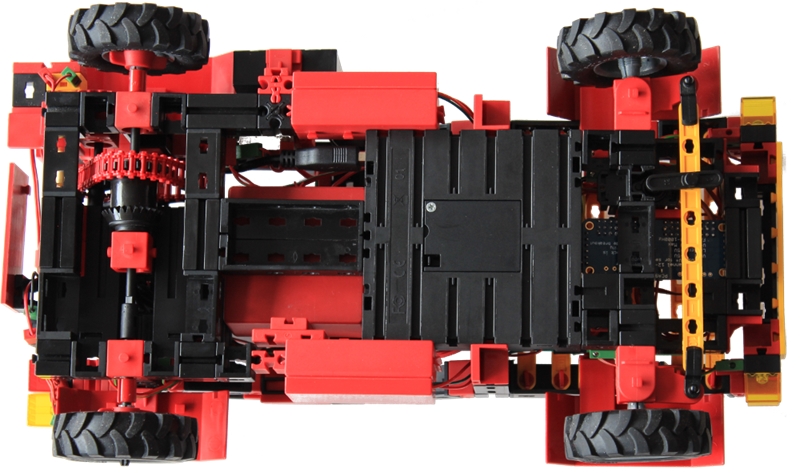
Unterseite des Autos
Hochgeladen am 12.2.2017, 20:43 von johafo. 2 / 5
Der Aufbau des Roboters ist sehr einfach: der TXT Controller bildet die Mitte des Autos. Rechts im Bild ist die Lenkung zu sehen: Der ft-Servo, darüber das Servo-Shield und die gelbe Spurstange der Achsschenkellenkung. In den roten Batteriegehäusen sind zwei Spannungswandler untergebracht (9 V zu 5 V (für den Servo) und 9 V zu 3,3 V (für die I²C Schnittstelle)).
Der Servo erhält über das Servo-Shield ein PWM-Signal, das der TXT über die I²C Schnittstelle steuert. Theoretisch ist es also ganz einfach, einen Servo mit dem TXT zu steuern ….
Der Antrieb (links im Bild) ist über zwei XM-Motoren realisiert, deren Drehmoment mittels einer Kette auf die Antriebsachse übertragen wird. Die Kette hat weniger Reibungsverlust als eine Übertragung mit Zahnrädern; das haben unsere Tests ergeben.