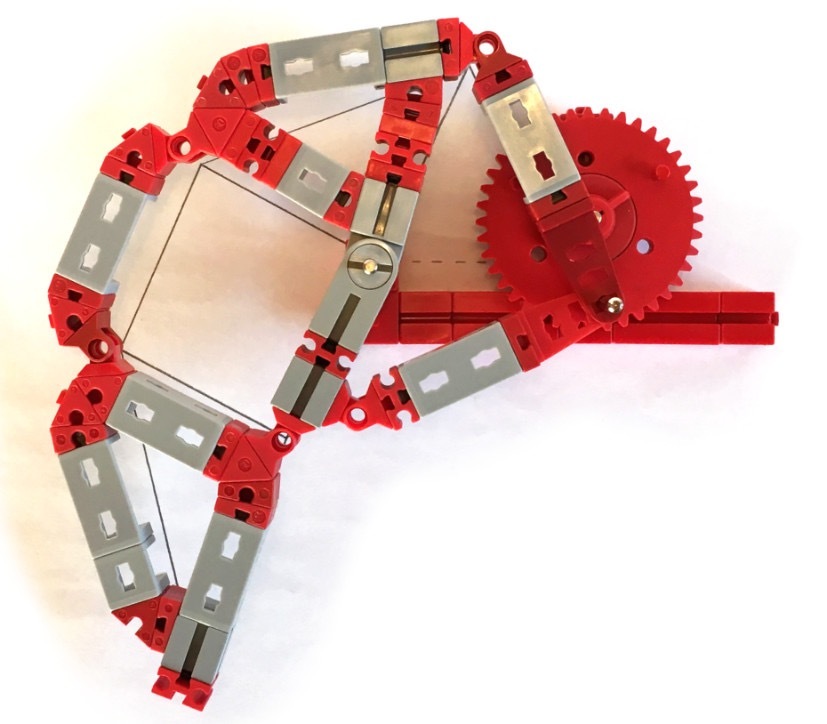
Detail Bein
Hochgeladen am 19.4.2021, 20:08 von Website-Team. 5 / 8
Die Beine wurden auf der Grundlage der Originalgeometrie von Theo Jansen entwickelt, die auf den Kurbelradius des Zahnrads Z40 skaliert wurde (siehe ft:pedia 1/2021, S. 32ff). Abweichend wurde ein sechstes Gelenk verwendet, um an der unteren Kurbel drei Teile beweglich zu verbinden.