|
|
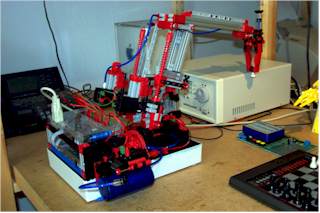
Der Trainingsroboter von 1985
Trainingsroboter 30 572 aus dem Jahr 1985 hier im schwarz-rot-silber Look der Industry Robots Original DOS SoftwareDie Original-Software dazu ist bei www.fischerwerke.de als Päckchen 30612 als GWBasic Version verfügbar. Die Software liegt in codierter Form vor. Soll sie mit NotePad ... angesehen und bearbeitet werden, ist ein LOAD"xxx" und ein nachfolgendes SAVE"xxx",A unter GWBasic erforderlich. Sie läuft sogar unter Win95/98 in der DOS-Box, allerdings sind die modernen Rechner zu schnell. Will man es ein wenig moderner : Seite TrainingsRobot alt konsultieren. Moderne RechnerDas beim Robot benutzte "parallele" Interface (Anschluß an Centronics-Drucker-Port) tut's bei modernen Rechnern (so ab Windows 2000) nicht mehr. Für den Anschluß an die aktuellen Rechner wird der Betrieb unter Einsatz der ROBO Connect Box empfohlen. Dem Rechner gegenüber verhält sich das parallele Interface dann wie ein modernes ROBO Interface. Folge : Eine 10 ms Taktung anstelle des alten 1 ms Taktung. Die am OriginalRobot eingesetzen Impulsräder haben 32 schwarze Balken zur Positionserkennung. Das ist zuviel für die 10 ms Taktung. Deswegen bei www.knobloch-gmbh.de drei neue Räder (No. 35 386 *sVr*) besorgen und mit jeweils vier dicken schwarzen Balken versehen. Die Lichtschranken sollten auf ein neutrale Mittelstellung eingestellt werden. Je nach Lichtverhältnissen im Raum kann aber auch eine andere Einstellung erforderlich sein. Dann ein wenig experimentieren. Das ModellDer Betrieb des Robots selber ist problemlos, jedoch sollte man seine Eigenheiten berücksichtigen: Ein Betrieb von Unter- und Oberarm ist nicht unabhängig voneinander möglich. Das hat Konsequenzen auch für die InitRoutine des Modells (START-Button) : Es kann zu Verklemmungen kommen. Ebenso sollte die Säule nicht hinter der Endstellung stehen (EndTaster zwischen Schaltnocken und Lampenbank). Also vor der ersten Inbetriebnahme von Robot85 den Robot mit dem InterfacePanel auf Vordermann bringen. Nachher klappts dann gut (wenn nichts dazwischen kommt). Das Modell kann wie in der Anleitung beschrieben aufgebaut und verkabelt werden. Es gibt da aber ein paar Details auf die man achten sollte : Die Schaltung der EndTaster E1, E3, E5. Hier muß Kontakt 3 anstelle von 2 gesteckt werden (also Schließer) dadurch entfällt die Funktion des Notaustasters. Grund : es kann die normale FishFace.DLL genutzt werden (sie hat eine Abbruchtimer-Funktion z.B. über die ESC-Taste). Die Gabellichtschranken reagieren auf das Raumlicht recht unterschiedlich, ggf. die Empfindlichkeit modifizieren oder die Lichtverhältnisse ändern (andere Aufstellung, anderes Raumlicht, Jalousie). SoftwareFür die moderneren Rechner gibt es Betriebsprogramme in VB2005 und C# .NET. Im Verzeichnis "bin" ist auch eine Ready-To-Run EXE enthalten (.NET Framework muß installiert sein).
Stand : 20.01.2009 |

 Einsatz eines
modifizierten Trainingsroboters als
Einsatz eines
modifizierten Trainingsroboters als