|
|
Einige Anmerkungen zu ROBO ProROBO Pro ist eine graphische Software zur Programmierung von fischertechnik Interfaces. ROBO Pro ist der Nachfolger von LLWin. Mit ROBO Pro kann das neue ROBO Interface samt Zusätzen im Online und im Download Modus mit allen Eigenschaften betrieben werden. Außerdem kann das Intelligent Interface - ggf. mit angeschlossenem Extension Module - im Online Modus betrieben werden. Zusätzlich gibt es auch noch einen Simulationsmodus, wo's dann auch ganz ohne geht, besonders für das Setzen von Eingängen nimmt man dann das Test-Panel. ROBO
Pro verfolgt ein Stufenkonzept in dem schrittweise komplexere Funktionen
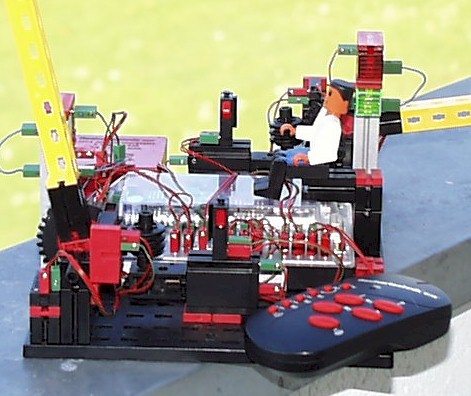
angeboten werden. Inzwischen (Okt. 09) ist ROBO Pro in einer gemeinsamen Version für das Intelligent Interface, das ROBO Interface und den neuen ROBO TX Controller verfügbar. ProgrammeDer Renner ist eine Kombination von LGB Schienen, Triebwagen, dem ft Control Set und einem ROBO Pro TX Programm zu Messung der Geschwindigkeit. Hier wird das neue Display des ROBO TX Controllers genutzt und die GleitkommaArithmetik eingesetzt. Der OecoRadler des Kastens OECO TECH wurde um eine Lichtschranke in den Speichen erweitert. So können Drehzahl und Geschwindigkeit gemessen werden. Zusätzlich wird die Spannung der Solarzellen angezeigt. Der Schweißroboter ist im Kasten Computing Start Kit eines der komplexesten Modelle. Hier dient er als Vehikel zur Vorstellung verschiedener Programmiermöglichkeiten, angefangen beim Level 1 bis zum Level 3. Der Schweißroboter wird dann auch noch als Vehikel für den Einsatz eines Bedienpanel und einer TeachIn-Steuerung gezeigt. Das Flieger-Karussell ist eine lustige Angelegenheit, bei der man kräftig einen auf die Finger bekommen kann, wenn man ins laufende Modell faßt, drum langes Kabel für die Verbindung zum Interface. Ansonsten werden hier besonders Schleifentechniken gezeigt. Die Schiebetür-Programme des ROBO Starter Kasten werden durch Einbau des Ultraschall-Sensors aus dem Kasten ROBO Explorer erweitert. Für Fan der Schrittmotoren hier eine kleine Bibliothek zu deren Betrieb. Anhand des schon etwas komplexeren Programmes Hanoi aus der Serie Hanoi Robots werden die Möglichkeiten von Level 3 gezeigt und erklärt. Auf der eTec-Seite mit Modelle des eTec-Kastens finden sich auch einige LLWin bzw. ROBO Pro Modelle Auf der Stanzen-Seite findet sich auch noch eine ROBO Pro Lösung.
Und ein wunderschöner Radarturm mit Flugzeug-Hangar
Eine interessante Drehbank in Mischbauweise :
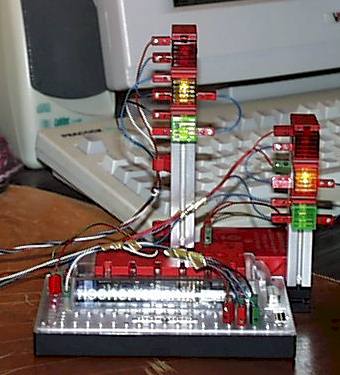
Und Ampeln für die Baustelle und für das Werkstor :
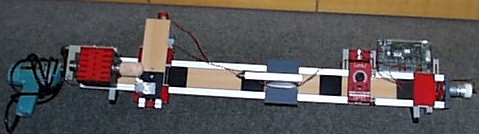
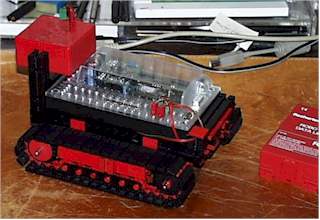
Wenn man mal von Schreibtisch aus mit der Raupe (Power Bulldozer Fahrgestell) spazieren fahren will :
Auf den Seiten TresorKarte, TresorCode GeldAuto mit Modellen aus dem Experimentierbuch von Profi Computing aus 1991 sind auch Lösungen für ROBO Pro enthalten. DownloadsDie Sources für die Programme sind in RoboPro.ZIP zusammengefaßt. Tutorial
Und Hinweise zum Bau eines Rollenprüfstandes mit Drehzahlmessung Stand : 05.10.2009 |
 Eine ROBO
Pro Lösung für die
Eine ROBO
Pro Lösung für die