Version 2
Hochgeladen am 17.2.2008, 19:31 von kehrblech. 8 / 9
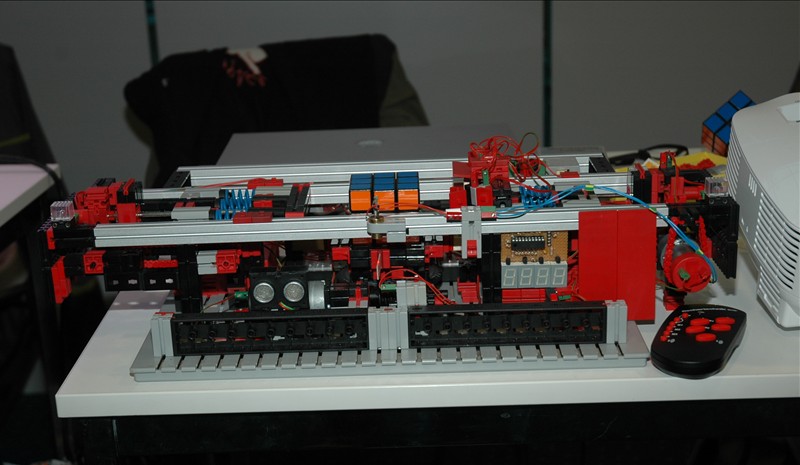
Das ist jetzt die neue Version des Roboters. Viel verändert hat sich nicht, nur die Schieber wurden verstärkt, die Laserlichtschranke umgebaut und er hat noch eine Anzeige bekommen, mit der die Farbmessung überprüft werden kann und angezeigt wird wieviele Züge noch ausgeführt werden müssen, bis der Würfel geordnet ist.
robvanbaal (26.2.2008, 21:02:06)
Ich möchte das gerne mal live sehen wenn dein Modell läuft. Ich schätze Mörshausen 2008? Oder schon irgendwo vorher? Am 31.05 gibt es ein Treffen in Veghel (Niederlande). Schade das du so weit weg lebst.
Stefan Falk (26.2.2008, 22:15:58)
Was macht denn der Entfernungssensor links vorne?
Gruß, Stefan
kehrblech (27.2.2008, 11:18:22)
Den Roboter werde ich warscheinlich mit nach Mörshausen nehmen. Der Entfernungssensor macht nichts. Ich hatte den mal angebaut um zu testen, wie stark sein Signal schwankt. Bei den Fotowiderständen für die Farberkennung gab es kleine Schwankungen, aber da dürfen gar keine sein. Seit ich den neuen Trafo mit Regler benutze (also nicht nur das Kabel direkt in die Buchse hinten am Interface) sind die Störungen weg. Ich habe einfach vergessen, dass der Sensor noch dran ist. Jetzt ist er aber weg.
Gruß Jan