Mobilkran und 3-Achsroboter
Hochgeladen am 25.7.2016, 14:24 von david-ftc. 50 / 76
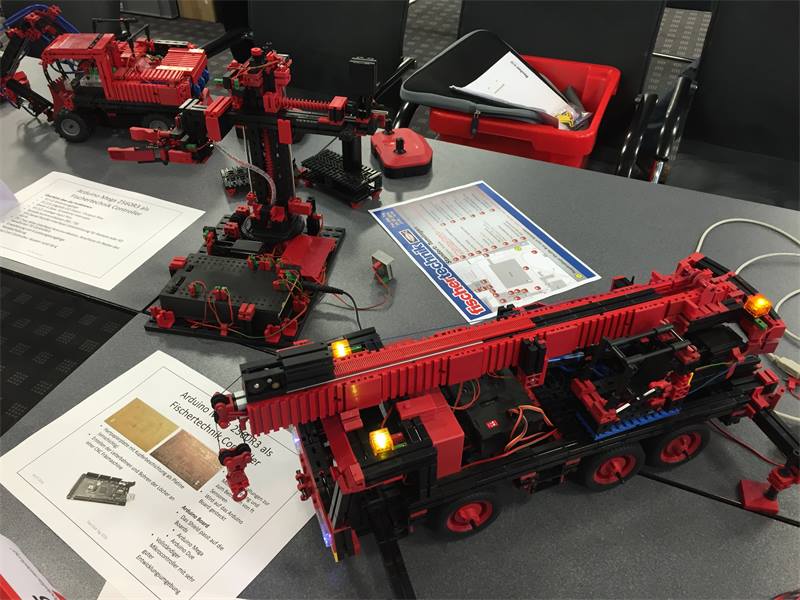
Mobilkran mit Allradlenkung und -antrieb, dahinter ein 3-Achsroboter, gesteurt über einen Arduino Mega
Mobilkran mit Allradlenkung und -antrieb, dahinter ein 3-Achsroboter, gesteurt über einen Arduino Mega