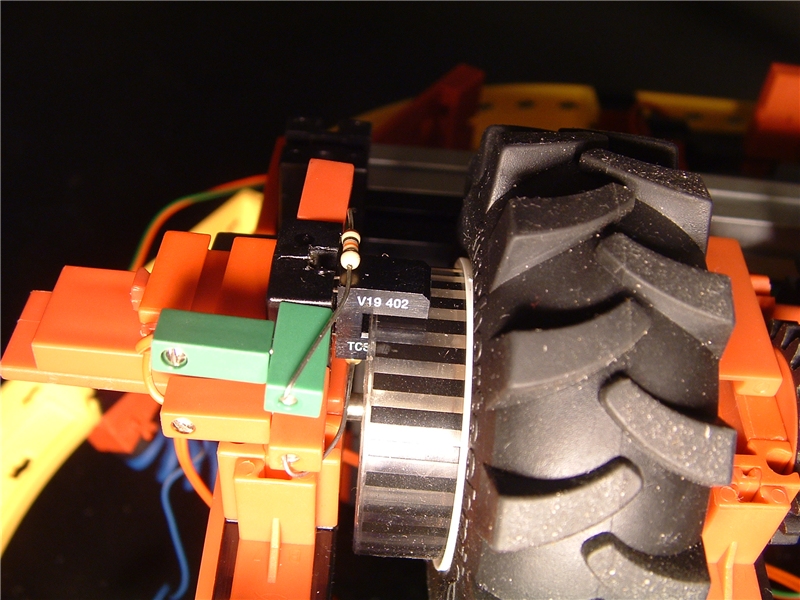
Photo interruptor with cables
Hochgeladen am 25.11.2005, 11:59 von niekerk. 2 / 6
Two resistors were added here: one for the transmitting LED, and one for the receiving transistor. This makes it very flexible. Here it is used with an Atmel ATmega8 input, but with different values it can be used for different interfaces and different voltages. For the RoboInterface, only the resistor on the transmitting side is required.
schnaggels (1.10.2010, 14:44:16)
Ich finde einfach keine Kaufquelle für den LS7183 Chip :(
Remadus (25.11.2005, 13:39:44)
Compact and effectiveCongratulation for this suitable construction. If you have the chance to apply a second sensor on the same wheel together with a quadrature decoder (like LS7183) you can increase the resolution of your signal four times (124 tics per revolution).