Roboter
Hochgeladen am 16.9.2007, 16:53 von Fredy. 5 / 12
Defiant (16.9.2007, 19:25:08)
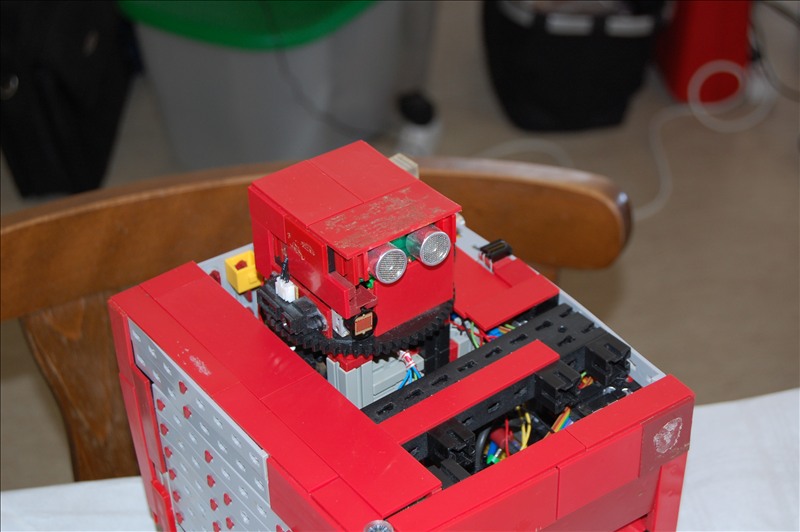
Ultraschall nach vorn und IR Entfernungsmesser an den Seiten auf einer drehbaren Plattform. So kann man immer den Sensor einsetzen, der für die Arbeit gerade am besten geeignet ist.
Taugt leider nichts fürs Labyrinth, da zu hoch eingebaut.