IMGP3860
Hochgeladen am 28.9.2003, 09:54 von sven. 11 / 11
DerMitDenBitsTanzt (30.9.2003, 11:01:46)
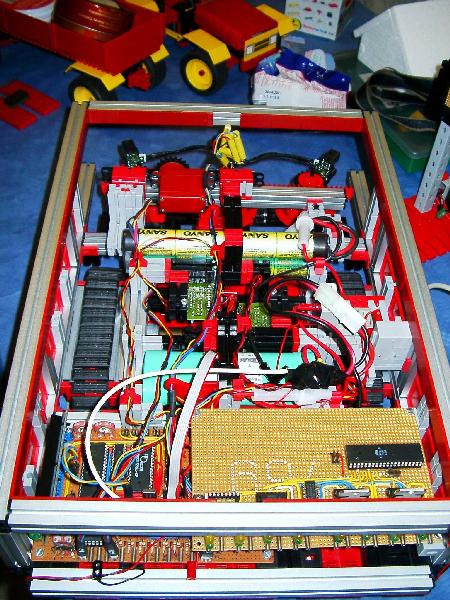
Innenansicht Fahrwerk<hüstel> Neben diversen wichtigen Komponenten, sieht man hier eine kreative Verkabelungsstudie. Ok, ok, ich gebe es zu: Da bis zur letzten Minute vor der Abreise zur Convention an dem Modell gebaut wurde, habe ich für Ästhetik im Innenraum keine Zeit geopfert. Da ist noch Spielraum für Verbesserungen. ;-)
Oben ist die Sensormechanik zu sehen. Ein Modellbauservo mit aufgesetztem fischertechnik-Zahnrad bewegt eine Zahnstange, welche die drei Scheiben mit den Sensoren schwenkt. Die beiden äußeren Sensoren sind für die Umgebungsabtastung/Hinderniserkennung (20 bis 150 cm) zuständig, während der mittlere Sensor (4 bis 30 cm) nach unten auf größere Bodenunebenheiten blickt. Darunter sieht man die Stromversorgung für die Motoren (NiMH-Akku, 8 Zellen, 3.000 mAh) und in der Mitte zwei kleine Fahrtregler-Platinen für die Ansteuerung der Fahrwerksmotoren (2 x ft-PowerMotor, rot, 50:1). Nicht sichtbar sind die beiden IR-Rad-Encoder mit je 32 Segmenten. Rechts befinden sich je ein Ein-Aus-Schalter für die Stromversorgung der Motoren und der Elektronik und ein Start-Stop-Taster. Der mintgrüne Klotz ist der Akku für die Elektronik (NiMH, 6 Zellen, 3.000 mAh). Links unten befindet sich die Steuerplatine für das Fahrwerk und rechts davon die (hier noch unfertige) Steuerelektronik für den Roboterarm.
Das Fahrwerk erreicht eine Höchstgeschwindigkeit von etwa 20 cm/s (0,72 km/h) und kann eine Nutzlast von mindestens 18 kg in der Ebene transportieren. Als Controller werden je ein ATMEL AT90S8515 und ein AT90S8535 für die Fahrwerkssteuerung und ein ATMEL ATmega32 für den Roboterarm verwendet. Zum Zeitpunkt der Convention war die Software für den Arm noch nicht geschrieben und die Software für das Fahrwerk bestand im Wesentlichen nur aus Hardware-Testroutinen. So konnte zwar die prinzipielle Arbeitsweise demonstriert werden (das Fahrwerk fur autonom und versuchte Hindernissen auszuweichen), aber höhere Funktionen waren noch nicht implementiert.