IMGP3859
Hochgeladen am 28.9.2003, 09:54 von sven. 10 / 11
DerMitDenBitsTanzt (30.9.2003, 09:52:26)
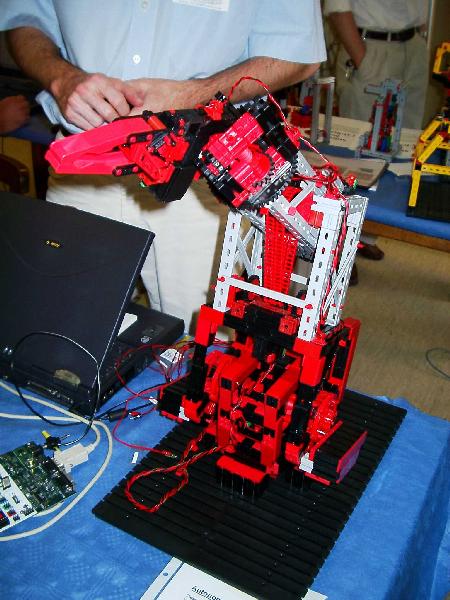
Frontansicht RoboterarmDer Arm kann direkt über der Bauplatte um 360 Grad gedreht werden (Achse 1). Der hier etwas nach hinten geneigte Teil des Armes ( unten schwarz, oben grau)kann bis auf die Bauplatte abgesenkt und etwas über die senkrechte Stellung hinaus nach hinten geschwenkt werden (Achse 2). Der zum Betrachter zeigende graue Teil des Armes kann um etwa 130 Grad auf und ab bewegt werden (Achse 3). Der vordere Teil ab dem schwarzen Drehkranz kann um 360 Grad gedreht werden (Achse 4). Der Greifer kann um etwa 120 Grad geschwenkt werden (Achse 5) und natürlich geöffnet und geschlossen werden (Achse 6).