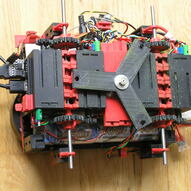
Maker 4wd Rasenmäher
Maker Kit 4wd als Rasenmäher
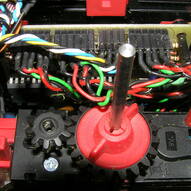
- Ansteuerung der Motoren erfolgt mittels TLE5205 H-Brücke, die Geschwindigkeit der vier Motoren wird durch je einen PID-Controller gesteuert.
- Durch die auf etwa einen Zentimeter genaue Positionsbestimmung des RTK-GPS-Modul Zed-F9P wird kein Begrenzungskabel benötigt.
- Erkennung der Orientierung mittels BNO055 Inertial Measurement Unit (IMU).
- Hinderniserkennung durch Rplidar A2 360° Laserscanner
- Mähmotor: Bürstenloser Außenläufer für Quadrocopter
- Rechenleistung wird durch einen Pine64 Quartz64 Model B (4x Cortex A55) geliefert.
- Software: Robot Operating System (ROS2)
- Batterie: 7x Babyzelle Akkus = 8,4V
In dieser Galerie gibt es 8 Bilder: