P2150001.JPG
Hochgeladen am 25.2.2012, 14:04 von Defiant. 10 / 10
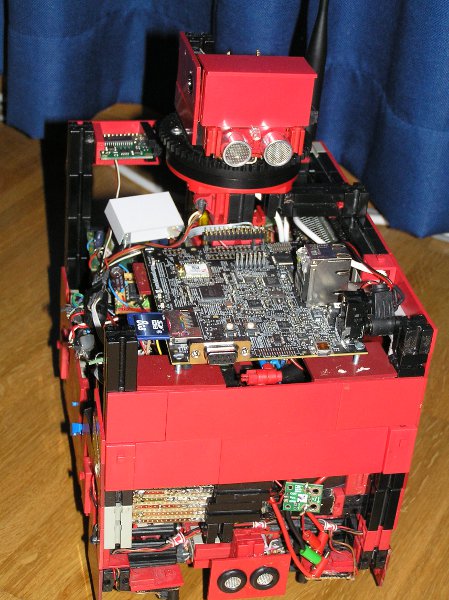
Mal ein aktuelles Bild: Hier zu sehen das Pandaboard (ARM Dual Cortex A9, Linux) was jetzt den ganzen Roboter über einen I2C-Bus steuert. Zusätzlich wurde der rechte IR-Distanz-Sensor im Kopf durch eine Kamera ersetzt.