Paketwendeanlage
Hochgeladen am 30.10.2010, 18:28 von peterholland. 1 / 12
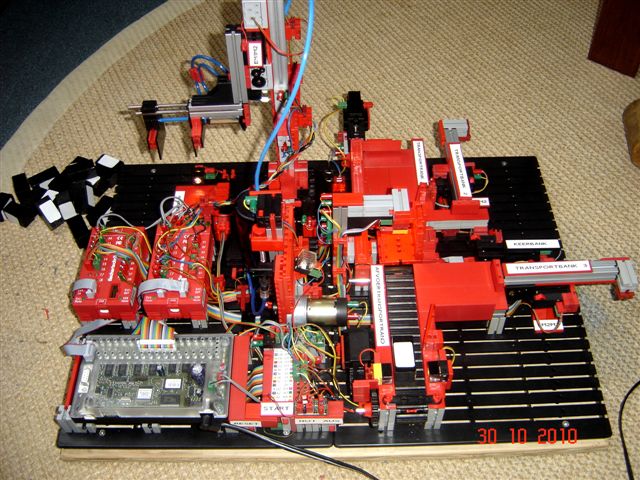
Die Paketwendeanlage hat die Aufgabe, den Strichcode des Paketes zu erkennen und das Paket danach zur weiteren Bearbeitung weiterzugeben. Die Anlage besteht aus 8 Motoren, von denen 7 Motoren in Rechts- und Linkslauf und variabler Drehzahl betrieben werden müssen. Des Weiteren sind 2 elektropneumatische Ventile zur Steuerung des Geifers und diverse Endtaster montiert.
peterholland (30.10.2010, 20:07:09)
Funktion der Anlage
Einschalten: Um die Anlage zu starten, muss der Start Taster I5 betätigt werden.
Das Unterprogramm “Reset naar 0-posities” funtioniert um sicherzugehen dass die ganze Anlage in 0-Ausgangs-position ist. Folgende Anlagenteile mussen zum 0-Ausgangsposition sein :
• Drehkran in 0-Ausgangsposition, EM1-I1 betätigt • Greifer in Oben-position, EM1-I5 betätigt • Greifer geöffnet, EM1-O2-Ventil > 1 Sekunde öffnen • Laufkatze Förderbank 1 in Ausgangsposition, EM1-I6 betätigt • Wendetisch in 0-Ausgangsposition, EM2-I1 betätigt • Förderbank 2 in 0-Ausgangsposition, EM2-I3 betätigt • Förderbank 3 in 0-Ausgangsposition, EM2-I5 betätigt • Kompressor + Leuchte O1 arbeiten um den Drucklufttank aufzufüllen Beim erreichen des Solldruckes der Anlage schaltet der Kompressor automatisch aus, und beim niedrigen Druck wieder ein. Anschluss O1 (Kompressor und Leuchte) hat dabei parmanent Spannung.
Wird jetzt mittels Lichtschranke I1, ein Paket auf der Bereitstellungsfläche lokalisiert, fährt der Greifer nach unten. Dies wird um 3 Sekunden verzögert, um einen genügenden Druck im Versorgungsbehälter zu garantieren. Wäre der Versorgungsbehälter nicht genügend mit Pressluft gefüllt, bestände die Gefahr, dass der Greifer die Last nicht genügend festhalten könnte, und somit würde diese bei der folgenden Drehung herunterfallen.
Der Greifer der mittels Motor EM1-M2 angetrieben wird, fährt solange nach unten bis der Endtaster EM1-I3 betätigt wird. Dieser Taster ist als Öffner verdrahtet. Diese Wahl ist getroffen worden, denn wenn dieser als Schließer verdrahtet würde, und eine Leitung dieses Tasters würde brechen, dann könnte dieser kein Signal mehr geben und der Motor würde nicht ausgeschaltet. Dieser Zustand wäre für Mensch und Anlage gefährlich. Wenn ein Draht beim Anschluss eines Öffners brechen würde, dann würde der Motor nicht anlaufen, weil die Robo-Interface diesen Zustand als „Motor in Endposition“ annehmen würde obwohl er noch in der Ausgangsposition ist. Dies hat den weiteren Vorteil, dass man den Fehler sofort auf diesen Motor begrenzen kann, und somit könnte ein solcher Fehler schneller behoben werden.
Nach Erreichen des Endtasters EM1-I3, wird der Greifer geschlossen mittels des elektropneumatischen Ventils EM1-O1. Ist der Greifer geschlossen, wird der Greifer wieder nach oben befördert, bis er den Endtaster EM1-I5 betätigt. Dieser ist ebenfalls als Öffner verdrahtet. Der Endtaster EM1-I5 betätigt ebenfalls das der Drehkran sich drehen kann. Mittels Motor EM1-M3 wird dieser um 180° um seine eigene Achse gedreht.
Der Taster EM1-I2 hat die Aufgabe die Drehbewegung des Drehkranes zu erfassen und an die Robo-Interface weiterzugeben. Somit werden die Umdrehungen erfasst und mit den erforderlichen Umdrehungen bis zum Erreichen der Endposition verglichen. Bei Erreichen der erforderlichen Drehzahl stoppt der Drehkran. Nach Erreichen der Endposition wird der Greifer heruntergefahren bis das Paket auf Fördertisch 1 liegt. Das Erreichen dieser Position wird über Endtaster EM1-I4 überwacht. Dieser ist ebenfalls als Öffner verdrahtet. Nach Erreichen der Förderbank 1, wird der Greifer wieder geöffnet, durch das elektropneumatische Ventil EM1-O2.
Anschließend wird der Greifer wieder hochgezogen, bis er Endtaster EM1-I5betätigt. Nach Betätigen von EM1-I5, wird der Drehkran wieder in seine Ausgangsposition gedreht. Bei Erreichen des Endtasters EM1-I1, wird Drehkran-Motor EM1-M3 abgeschaltet.
Die Anlage kann erst wieder gestartet werden, wenn das Paket den gesamten Zyklus durchlaufen hat. Dies bedeutet, dass das Paket an der Fotozelle I3 registriert worden sein muss bevor ein nächstes Paket wieder in die Anlage gelangen kann. Nachdem der Greifer hochgezogen wurde, beginnt der nächste Arbeitsschritt.
Jetzt wird die Laufkatze mittels Motor EM1-M4 angetrieben. Diese befördert das Paket über Förderbank 1 auf den Wendetisch. Ist der Endtaster EM1-I7 betätigt, wird Laufkatze-Motor EM1-M4 wieder in Seine Ausgangsposition gefahren und mittels Endtaster EM1-I6 gestoppt. Jetzt beginnt die Aufgabe der Fotozelle I2. Die Fotozelle I2 hat die Aufgabe, den Strichcode auf dem Paket zu erkennen.
Paket unter Fotozelle I2: Da das Paket beliebig gedreht sein kann, sind jetzt zwei verschiedene Fälle möglich: • Strichcode wird erkannt • Strichcode wird nicht erkannt
-
Wird der Strichcode erkannt, geht die Bearbeitung weiter wie folgt: ( I2 = 1 ) Erkennt Fotozelle I2 den Strichcode auf dem Paket, kommt Laufkatze-Motor EM1-M4 wieder zum Einsatz und beginnt auch das Förderband das Paket in Richtung Anlagenende zu befördern. Laufkatze-Motor M4 musst jetzt das Paket vom Wendetisch auf das Förderband drücken. Ist das Paket auf dem Förderband, wird Laufkatze-Motor EM1-M4 durch Endtaster EM1-I8gestoppt, und kehrt wieder (in anderes Prozess) in seine Ausgangsposition zurück.
Das Förderband wird mittels Motor EM2-M4 angetrieben. Erreicht das Paket das Anlagenende, wird dies mittels der Fotozelle I3 festgestellt, und Förderband-Motor-EM2-M4 wird ausgeschaltet. Nachdem das Paket am Anlagenende erkannt worden ist, kann die Anlage wieder mit einem neuen Zyklus beginnen. -
Wird der Strichcode nicht erkannt, geht die Bearbeitung weiter wie folgt: ( I2 = 0 ) Fotozelle I2 hat den Strichcode nicht erkannt, also muss das Paket so oft gewendet werden, bis dass der Strichcode lesbar ist. Da der Wendetisch in 0-Ausgangsposition ist (EM2-I1 betätigt) und die Fotozelle I2 meldet das der Strichcode nicht lesbar ist, wird der Wendetisch um 90° um seine eigene Achse gedreht, der mittels Motor EM2-M1 angetrieben ist. Da der Wendetisch jetzt um 90° gedreht ist, ist das Paket ebenfalls um 90° gedreht. Das Erreichen der Endposition des Wendetisches überwacht Endtaster EM2-I2. EM2-I1 und EM2-I2 sind ist ebenfalls als Öffner verdrahtet. Nach Betätigung des Endtasters EM2-I2, wird Förderbank-2 Motor EM2-M2 angetrieben, der das Paket vom Wendetisch auf die Förderbank 3 drückt. Diese Endposition überwacht Endtaster EM2-I4, der als Öffner verdrahtet ist. Nach Erreichen dieser Endposition, wird Förderbank 2 wieder eingefahren und Förderbank-3 (EM2-M3) kommt zum Einsatz. Endtaster EM2-I3 überwacht die Ausgangsposition von Förderbank-2 Motor EM2-M2. EM2-I3 ist ebenfalls als Öffner verdrahtet.
Jetzt wird Förderbank-3 betätigt, um das Paket über den Fördertisch 3 auf das Förderband zu transportieren. Motor EM2-M3 ( v = 5 !) treibt Förderbank-3 an. Das Erreichen des Förderbandes wird mit Endtaster EM2-I6 überwacht. Endtaster EM2-I6 ist als Öffner verdrahtet.
Jetzt wird Förderbank-3 wieder in seine 0-Ausgangsposition zurückgefahren , und starter Förderband-Motor EM2-M4 im Linkslauf zum Wendetisch. 0-Ausgangsposition Förderbank-3 wird überwacht durch den Endtaster EM2-I5, der als Öffner verdrahtet ist. Wenn förderbank-3 -Motor EM2-M3 wieder in seiner Ausgangsposition ist, stopt auch Förderband-Motor EM2-M4.
Jetzt überprüft die Fotozelle wieder ob der Strichcode lesbar ist oder nicht. Ist der Strichcode noch nicht lesbar, müssen die vorherigen Schritte wieder von Vorne begonnen werden. Dies wiederholt sich so oft, bis der Strichcode lesbar ist.
Ist der Strichcode jetzt lesbar, wird der Ablauf wie folgt weitergehen:
Erkennt Fotozelle I2 den Strichcode auf dem Paket, kommt Laufkatze-Motor EM1-M4 wieder zum Einsatz und beginnt auch das Förderband das Paket in Richtung Anlagenende zu befördern. Laufkatze-Motor M4 musst jetzt das Paket vom Wendetisch auf das Förderband drücken. Ist das Paket auf dem Förderband, wird Laufkatze-Motor EM1-M4 durch Endtaster EM1-I8gestoppt, und kehrt wieder (in anderes Prozess) in seine Ausgangsposition zurück.
Das Förderband wird mittels Motor EM2-M4 angetrieben.
Erreicht das Paket das Anlagenende, wird dies mittels der Fotozelle I3 festgestellt, und Förderband-Motor-EM2-M4
wird ausgeschaltet.
Nachdem das Paket am Anlagenende erkannt und entfernt worden ist, kann die Anlage wieder mit einem neuen Zyklus beginnen.
Overall- Reset Beim Problemen irgendwo im Prozess kommen durch das Betätigen von Reset Taster I5 alle Anlagenteile wieder zum 0-Ausgangsposition .