Steckeranschlüsse hinten
Hochgeladen am 14.2.2017, 19:27 von DirkW. 35 / 38
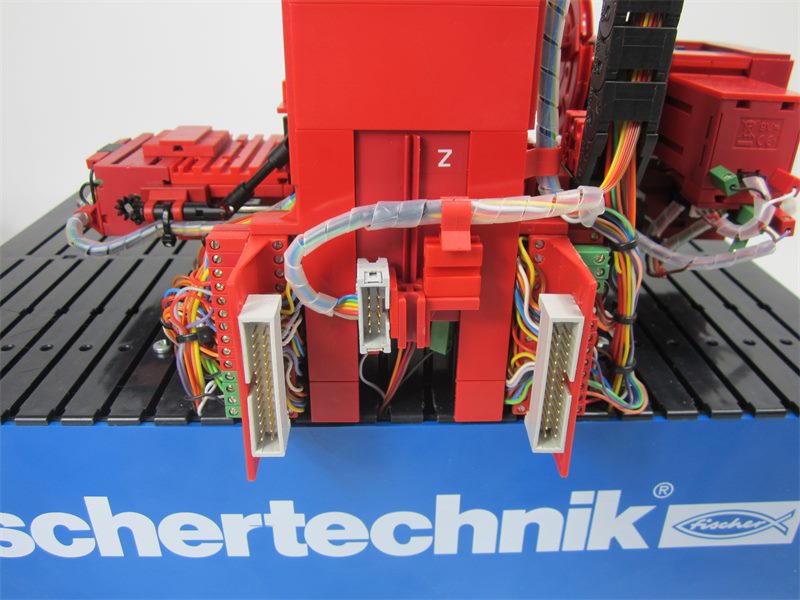
Links und rechts die Anschlüsse für die beiden ROBO TX Controller. Mittig der I2C-Anschluss für die Segmentanzeige und das Display.
Links und rechts die Anschlüsse für die beiden ROBO TX Controller. Mittig der I2C-Anschluss für die Segmentanzeige und das Display.