Unimog U421 mit gestengesteuerter Fernbedienung
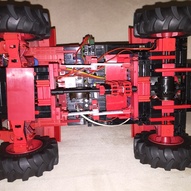
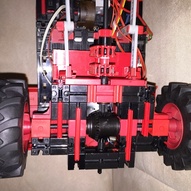
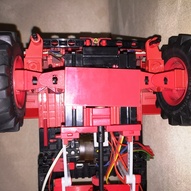
Hier mein später Beitrag zum Thema Unimog. Er hat ein paar bekannte Klassiker: Allradantrieb, Federung, Servolenkung.
Und er hat ein paar Neuigkeiten:
- Funkfernsteuerung mit Gestenkontrolle: die Fahrgeschwindigkeit und die Lenkung werden über den Kipp- bzw Drehwinkel um zwei Achsen gesteuert: Kippen nach vorne = Vorwärtsfahrt, Kippen nach hinten = Rückwärtsfahrt, Kippen nach links = Lenkeinschlag nach links, Kippen nach rechts = Lenkeinschlag nach rechts. Alle diese Bewegungen werden mit feiner Auflösung von 8 bit übertragen, dadurch ist das Fahrzeug sehr fein steuerbar.
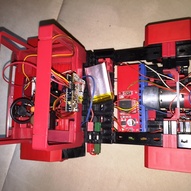
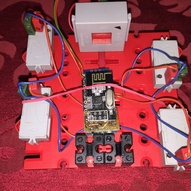
- Datenübertragung über NRF24 (Sender und Empfänger) jeweils an Arduino Nano Board
- Erfassung des Kipp- bzw. Drehwinkels über MPU6050 am Arduino Nano (Sender)
- Eigenbau-Servoshield am Arduino-Nano Empfänger
- Monster-Motoshield mit VNH2SP30 Motortreiber als Fahrtregler
- Zweiton-Hupe, die über Taster an der Fernbedienung betätigt wird
- Beleuchtung, Blinker, Bremslichter
In dieser Galerie gibt es 13 Bilder: