Libelle met Smartbird en Pijlstaartrog
Hochgeladen am 26.7.2014, 20:51 von peterholland. 37 / 39
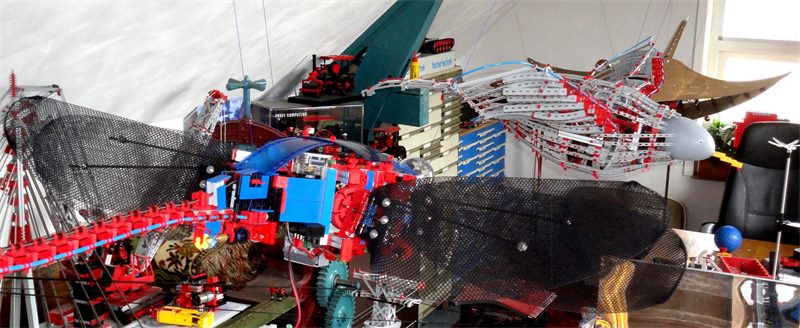
Op de achtergrond zowel de Smartbird als de Pijlstaartrog.
Het werkingsprincipe / kinematik van resp. de Smartbird, de Pijlstaart-rog én de BionicOpter van Festo heb ik nagebouwd met Fischertechnik. Ik heb elk model met 3 draden aan het plafond bevestigd. Voorts uitgerust met de oude IR-afstandsbediening voor inschakeling van de centrale vleugelaandrijving (1), naar links- en naar rechts vliegen/zwemmen (2) en positionering van lijf- en staarthoogte (3). Ik heb bewust de oude IR-afstandsbediening gebruikt ivm het hogere schakelbare vermogen én de automatische midden-positie terug-stel-mogelijkheid. De nieuwe afstandbesturingen zijn software-matig beveiligd en schakelen bij iets hogere piek vermogens (te) snel uit.