|
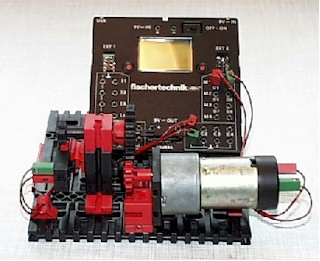
| Drehzahlprüfstand mit RoboPro TXHier soll die Drehzahl [1/min] von fischertechnik-Motoren - gemessen an der Abtriebswelle - mit einem einfachen RoboPro-Programm und dem ROBO TX Controller bestimmt werden. Die Messung selber wird mit einfach Mitteln durch geführt Motor mit Zahnrad an M1, Impulsrad an C1 (Zähler : 4 Impulse/Umdrehung). Da der gezeigte PowerMotor für eine Messung direkt auf der Abtriebswelle ist, wird noch eine Untersetzung 2 : 1 zwischengeschaltet. Mehr ist nicht.
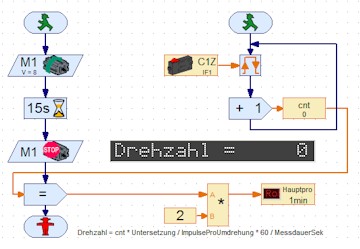
Die Bestimmung der Drehzahl wird dann durch das Meßprogramm in einer vorgegebenen Prüfzeit von 15 Sekunden durch Zählen der Impulse in einem zweiten Thread durchgeführt. Am Programmende wird dann die Drehzahl in 1/min errechnet und angezeigt. Programm DrehzahlD :
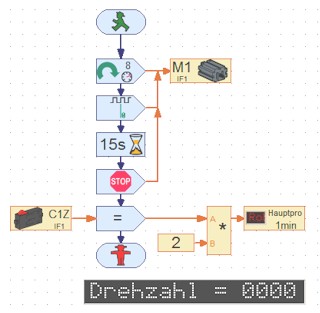
Noch einfacher Programm DrehzahlZ :
DownloadRoboRadarTX enthält die zugehörende RoboPro-Source. Stand : 22.02.2011 |