|
| | Robo Pro : Joystick mit acht Richtungen
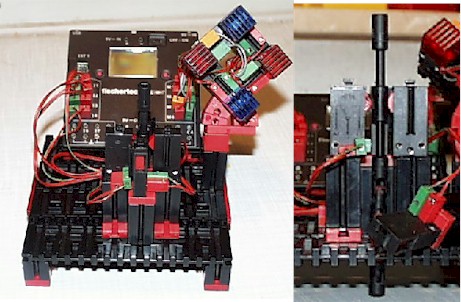 |
Joystick basierend auf einem kleinen
schwarzen Kardangelenk und vier Tastern.
Die Taster müssen sorgfältig so justiert werden, dass sie die
Klemmhülse berühren, aber natürlich noch nicht schalten.
Taster oben I1, Taster unten I2
Tater links I3, Taster rechts I4
Lampen (zum Test) analog. |
Programm JoyStick :
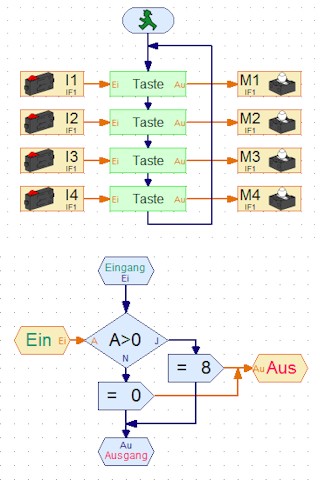 |
Betrieb des Joysticks durch regelmäßige
Abfrage der Taster 1 - 4, wenn Taster aus : zugehörende Lampe aus, wenn
an : Lampe an.
Beim Einsatz im Zusammenspiel mit anspruchsvolleren Modellen wird man
die Programm in ein Unterprogramm legen und aus Lampe an/aus wohl eher
Motor vor/zurück, rechts/links machen.
Unterprogramm zur Abfrage einer Taste und schalten des zugeordneten
Ausganges. Bei echten Motoren wird man rechts/links durch
positive/negative Werter realisieren. Der zugehörende Wert gibt
Power/Speed an.
Durchgereicht (Eingangsparameter) wird hier immer eine Taste, die auf
ein/aus abgefragt wird, daraus entsteht der Schaltbefehl für den Ausgang
Motor/Lampe.
|
Download
Source enthalten in RoboRadarTX.ZIP
Stand : 31.01.2010
|