|
|
Hinweise zum Betrieb der Gabellichtschranke und der Impulsscheibe des Robots 30572 aus dem Jahr 1984
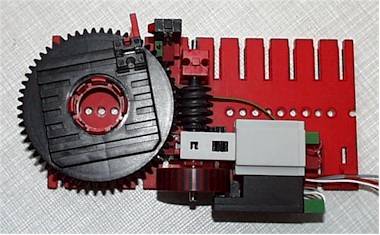
Versuchsaufbau zum Antrieb einer (Robot)Säule über ein 60er Zahnrad und Schnecke mit Getriebe. Die Impulsscheibe ist auf die Schneckenwelle aufgesteckt, die Gabellichtschranke (mit 32 schwarzen Impulsstreifen) auf den Minimotor. (Motoruntersetzung 64,7 : 1) Im Beispielprogramm ist der Minimotor auf M1 geschaltet (rechtsdrehend gegen Endtaster gepolt), Endtaster auf E7, Gabellichtschranke auf E8, (+) vorn, Mittelkontakt auf Erde.
Der Betrieb erfolgt mit FishFRT6.DLL bzw. FishF532.DLL und der Methode MoveTo. Bei einer Motordrehzahl von ca. 11700 U/min bei 9V am seriellen Interface, einer Untersetzung von 64,7 und 64 Impulsen/U ergibt sich eine verfügbare Verarbeitungszeit pro Impuls von 60000 mSek / 11700 U/min * 64,7 : 1 / 64 Impulse = 5.18 mSek. Das heißt bei einer Verarbeitungszeit von 7,9 mSek für eine Statusabfrage beim seriellen Interface ist ein sicherer Betrieb nicht möglich (es wird nur jeder zweite Impuls erkannt). Das parallele Interface hat eine wesentlich kürzere Verarbeitungszeit. Bei FishFRT6.DLL unter WinNT 3 mSek. Hier ist ein Betrieb unter Einschränkungen möglich, aber nicht sinnvoll. FishF532.DLL unter Win95 liefert eine Verarbeitungszeit von 0,5 mSek (direkter Portzugriff) damit ist ausreichen "Luft" für einen sicheren Betrieb vorhanden. Getestet wurde hier unter Win95 mit VB5 auf einem Pentium 200 Rechner. Wichtig ist hier die Einstellung des Eigenschaft OutputDelay (bei Pentium 200 = 32), die dem Interface eine Verschnaufpause gönnt. |