Delta-Roboter
Hochgeladen am 1.9.2017, 18:35 von DirkW. 23 / 24
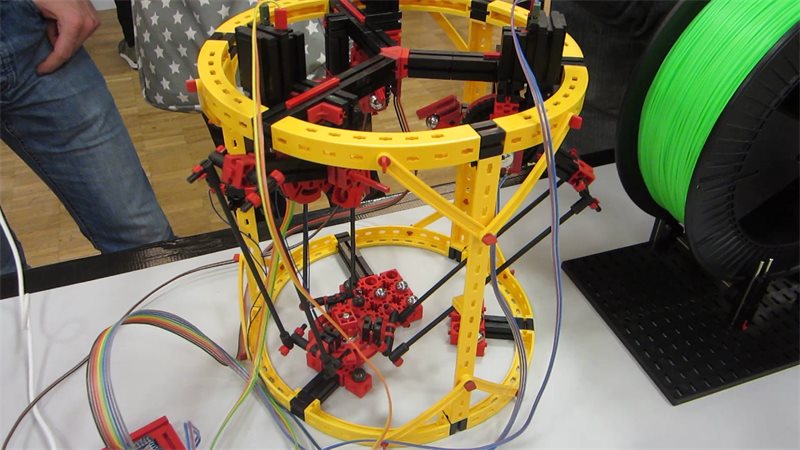
Einfach aufgebauter Delta-Roboter gesteuert über ein Arduino-Shield. Spielt über einen Nunchuk Tic Tac Toe. Das war der Hit auf der Ausstellung.
Stefan Falk (1.9.2017, 18:41:57)
Das glaub ich gern - gibt’s da noch Details? Gruß, Stefan
geometer (5.9.2017, 19:37:18)
Mehr Details zum Delta-Roboter wird es in unserem Buch “fischertechnik-Roboter mit Arduino” geben: https://www.dpunkt.de/buecher/12514/9783864904264-bauen%2C-erleben%2C-begreifen%3Afischertechnik®-roboter-mit-arduino.html geben.
Ein Video von der Maker-Faire findet sich auf der Seite unseres Verlags: https://www.facebook.com/pg/dpunkt.verlag/videos/
Der Roboter wird von drei S-Motoren bewegt. Die Roboterhand bewegt sich von einer Position im Arbeitsbereich (dem unteren Bereich der Trommel) zu einer anderen Position in durchschnittlich 350 ms bei einer Positioniergenauigkeit von ca. 1 mm.
Auf der MakerFaire spielten Erwachsene und Kinder über 200 Partien Tic-Tac-Toe gegen den Roboter. 46 mal gewann der Mensch, 63 mal der Roboter, die restlichen Partien endeten unentschieden. Ich hätte den Roboter auch immer optimal spielen lassen können, dann hätte er nie verloren. Das wäre aber ziemlich unmotivierend gewesen.