Plotter, Robotergreifer, Fahrzeuge
Hochgeladen am 23.9.2018, 16:50 von Stefan Falk. 47 / 184
vleeuwen (6.10.2018, 10:28:45)
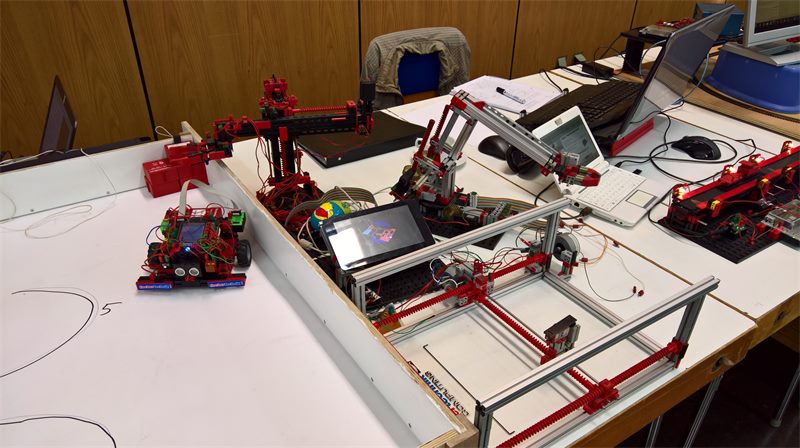
My stepper project: Original ft plotter with two steppers.
The controller is a Raspberry Pi 3 with motor/stepper head with as OS Windows 10 IoT and as integrated development environment MS=Visual Studio 2017 community (C#, VB.NET, Python.NET C/C++). Behind this model the old FT Roboter and a more recent FT Robot. At the left the FT-Bot (design C.van Leeuwen) that has been used during the Robot skills in Canada some years ago. Here is in use to demonstrate the use of a SLI. An SLI is an in C/C++ writtenlibrary that contains several RoboPro elements. See also: https://github.com/fischertechnik/txt_demo_ROBOPro_SLI Demo1.
vleeuwen (6.10.2018, 11:04:00)
39460 BA Computing-Plotter-Scanner 1985 http://www.fischertechnik-museum.ch/museum/displayimage.php?album=72&pos=22
39461 BA Computing-Trainingsroboter 1985 http://www.fischertechnik-museum.ch/museum/displayimage.php?album=72&pos=23