5-Achs Roboter
Hochgeladen am 23.11.2014, 19:12 von david-ftc. 1 / 4
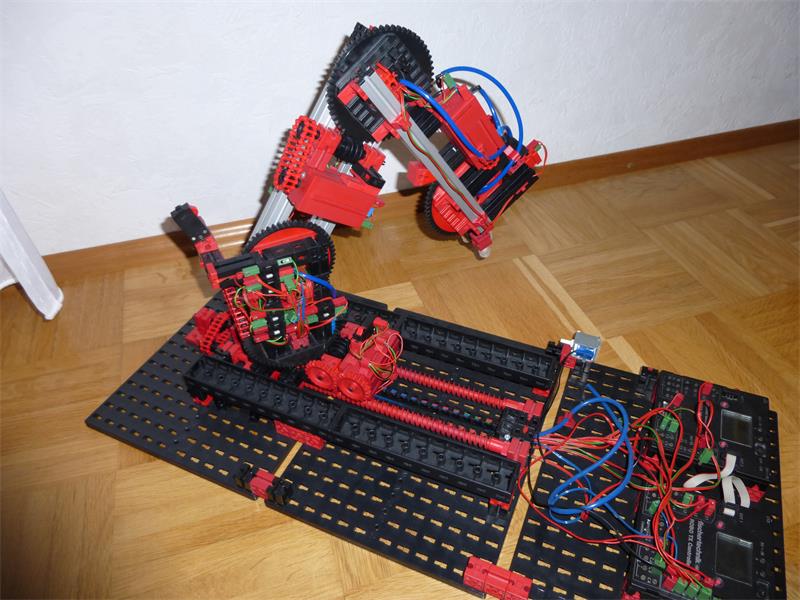
Achsenübersicht:
- X-Achse: Achse für horizontale Bewegungen
- Y-Achse: Achse zum drehen des Aufbaus 3 / 4. A / B-Achse: Achsen zum Ausrichten des Armes
- C-Achse: Achse zum Ausgleichen, diese wird benötigt, um den Saugnapf zu kippen Die X Achse wird mit einem Powermotor betrieben, die restlichen vier Achsen werden von je einem Encodermotor angetrieben. Dieser ist erfordlich, um den Roboter relativ genau zu steuern.
Der Roboter ist so programmiert, dass man dem Programm lediglich die Position und den Winkel des Saugnapfes angibt. Das Programm errechnet die Winkel der einzelnen Achsen A bis C und steurert dann die Maschine. Während sich der Roboter bewegt, ist der Saugnapf stets zum Boden gerichtet. (Diese Funktion ist im Programm verankert)
david-ftc (24.11.2014, 14:36:47)
Die “Entwicklung” meines Roboters ist noch nicht abgeschlossen. Im Moment ist die Leistung noch nicht zufriedenstellend, da er eigentlich in der Lage sein sollte, auch weiter entfernte Objekte ansaugen zu können. Dies klappt allerdings nicht, da der Arm voll ausgefahren zu schwer ist und von dem relativ schwachen Encodermotor nicht angehoben werden kann…