Radantrieb
Hochgeladen am 10.12.2008, 16:45 von kehrblech. 4 / 18
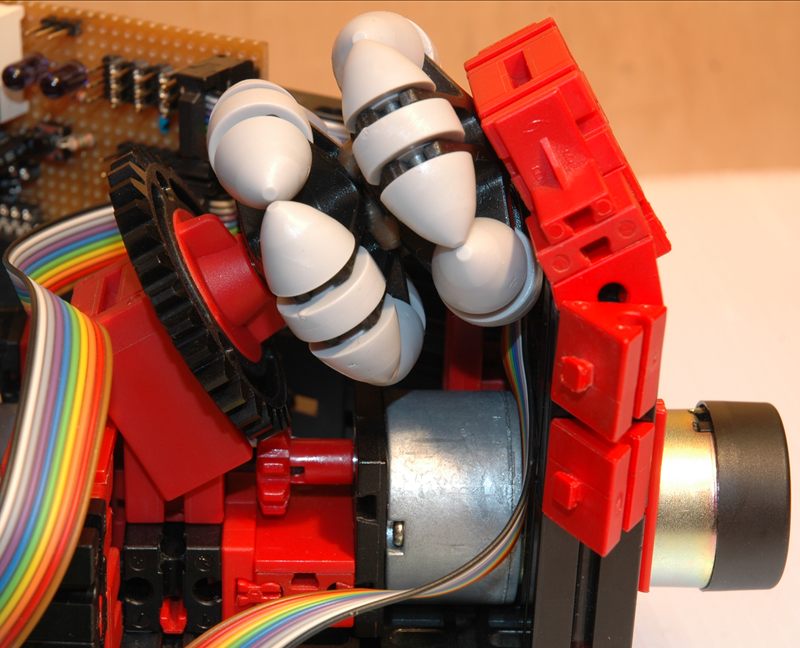
Um möglichst wenig schräge Teile zu haben, sind nur die Räder angewinkelt, die Motoren sind schon wieder gerade. Die Räder funktionieren genau wie ein normales Rad, nur das sie sich senkrecht zur normalen Drehrichtung frei drehen können.
Stefan Falk (10.12.2008, 18:51:37)
Wenn Du das wirklich zum Laufen bringst: SA-GEN-HAFT! Einfach nur irre, was Du in Deinem Alter für Aufgaben bezwingst.
Tief beeindruckt, Stefan
schnaggels (12.12.2008, 10:30:37)
Dem schließe ich mich 100% an, weiter so Jan! Ich wünschte ich hätte neben der Arbeit mehr Zeit für solche Projekte…
Gruß, Thomas
Severin (12.12.2008, 17:52:22)
Hammer Gerät!
Wo hast du die Omniwheels gekauft? Ich such schon länger Fischertechnik-passende…
Gruß Severin
Udo2 (12.12.2008, 18:19:36)
Hallo Severin, schau hierzu mal unter www.robotikhardware.de
kehrblech (13.12.2008, 13:27:02)
Da habe ich die auch her. fischertechnik-passend sind die leider nicht, sie haben 8mm Achsdurchmesser. Ich habe deshalb die Hülse 31983 hineingeklebt. Auch die Achse selber ist fest mit dem Rad verklebt.