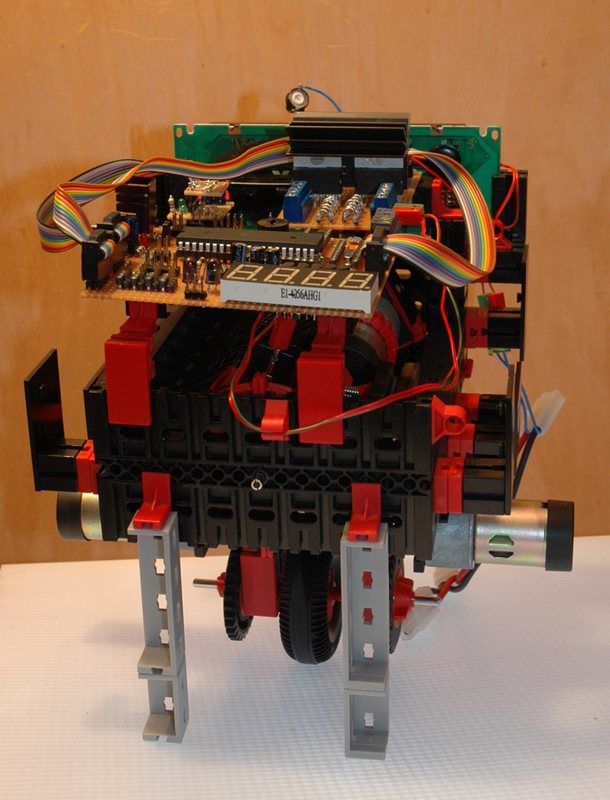
Von hinten
Hochgeladen am 16.10.2008, 00:46 von kehrblech. 3 / 5
Der Roboter misst seinen Winkel nicht mehr mit Abstandssensoren, sondern mit einem Beschleunigungssensor.
Severin (1.12.2009, 15:34:06)
Wo hast du die 4*7 Segmentanzeige gekauft?
Gruß Severin
kehrblech (2.12.2009, 21:18:46)
Gar nicht, die kommt aus irgendeinem alten Gerät. Aber du kannst natürlich auch vier einzelne Anzeigen nehmen.
Stefan Falk (16.10.2008, 10:38:20)
Boah ey. Da fällt mir nix mehr ein. Genial, wenn Du das hinkriegst.
Wenn der Winkel mit Beschleunigungssensoren gemessen wird, hast Du dann nicht Probleme mit kumulativen Fehlern? Also z. B. steht der Robbi einwandfrei, aber ein Sensor meldet eine Beschleunigung winzig klein von 0 verschieden, die Du dann ja letztlich integrierst, was irgendwann dazu führt, dass der Robbi denkt, er stünde schief?
Gruß und großer Respekt, Stefan
kehrblech (16.10.2008, 10:56:04)
Ein Beschleunigungssensor misst nicht die Geschwindigkeit oder Beschleunigung mit der der Roboter kippt, sondern die Kraft mit der er beschleunigt wird(1g, Erdanziehungskraft), da er aber fest auf den Roboter geschraubt ist, kann er nicht herunterfallen aber es wirkt trotzdem eine Beschleunigung auf ihn.
Gruß Jan
Severin (16.10.2008, 12:43:34)
die 4x7 Segmentanzeige hab ich auch, mal wo ausgebaut. Wie steuerst du die an?
kehrblech (16.10.2008, 13:01:41)
Das mache ich mit einem Attiny2313 und Multiplexing, habe ich bis jetzt aber noch nicht gebraucht, weil es einfacher ist das Display zu benutzen.
Severin (16.10.2008, 17:40:27)
Übrigens sehr geniales Modell!
heiko (19.10.2008, 12:55:06)
Das ist schon recht wahnsinnig. Ich würd mich über ein Video freuen, und noch viel mehr über eine Beschreibung des Reglers, den Du da drin hast :-)
kehrblech (19.10.2008, 14:30:41)
Video gibts von dem nicht. Er kann ja gar nicht balancieren, weil das Gewicht zu leicht ist. Vorwärts und rückwärts geht eigentlich, aber weil er immer zu Seite umkippt sieht man davon nichts. Ich habe ihn jetzt wieder auseinander genommen und starte einen neuen Versuch mit einem anderen Gewicht. Gesteuert wird er über zwei PID-Regler: Einen für links/rechts einen für vorwärts/rückwärts. Beide haben als Eingangsgröße die Abweichung von der Senkrechten, der vorwärts/rückwärts-Regler gibt die Geschwindigkeit der Motoren für das Rad aus, der andere die Beschleunigung der Motoren für das Gewicht.
Ich habe jetzt aber ein Video vom Zweirad-Roboter gemacht, der hat das gleiche Prinzip, aber eben nur zwei Richtungen in die er umkippen kann.