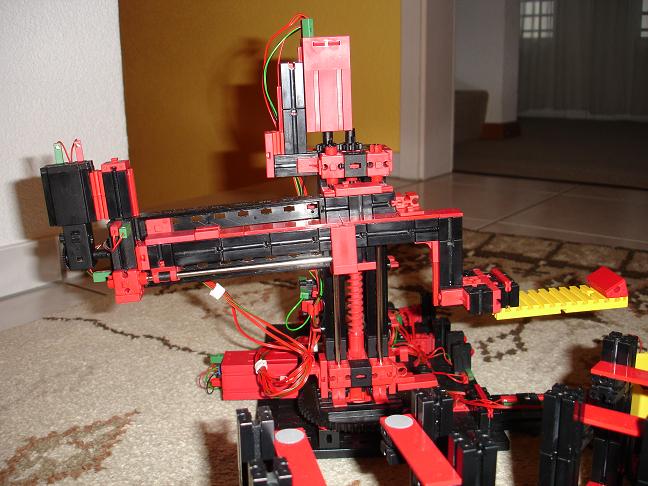
Gesamtübersicht von links
Hochgeladen am 11.6.2010, 18:37 von FischerPapa. 14 / 14
Schlagworte: Turmregallager, TRL, Regallager.
Hier seht ihr nochmal den Einlagerungsroboter von links.
Endlich (5.10.2010, 18:57:03)
Eine leichte Schräglage, die sich bei meinem Roboter (Nachbau von Idustry Robots II) auch nicht verändern lässt, habe zwar schon Verstärkerungen eingebaut, aber die leichte Schräglage bleibt immer noch. Bei mir sitzt aber allerdings der Encoder-Motor da, wo bei dir der Mini-Motor sitzt.
MfG Endlich
Udo2 (5.10.2010, 19:54:49)
Hallo Miteinander, hier mal zwei Möglichkeiten den Robo etwas gerader zu bekommen:
- Drehkranzzwischenlage
- M-Achse in die BS30 des waagerechten Armes Die Lagerung zwischen senkrechter und waagerechter Achse kann ich leider nicht einsehen … Gruss, Udo2
FischerPapa (8.10.2010, 22:08:02)
Hallo, danke für die Tipps. Die waagerechte Achse ist mit zwei roten Bausteinen mit Loch (Bezeichnung?) auf den zwei Achsen gelagert.
MfG FischerPapa
Udo2 (9.10.2010, 18:24:30)
Hallo, das Foto “X/Y-Achse” zeigt doch die senkrechte Parallellagerung 2x31436 Gelenkwürfel-Klaue mit 2x 31893 Hülse Ø4,1xØ7,9x15 auf M-Achse. Das ist mit nur 15mm Führungslänge (Laibung) für den langen waagerechten Arm eine entschieden zu kurze Lagerung. Zwei Lagerungen auf jeder M-Achse mit mindestens 30mm Rasterabstand wären da schon besser. Auf dem obigen Foto ist auch die Durchbiegung des waagerechten Armes gut zu sehen, die seitlich mit ein oder beidseitig zwei eingelegten M-Achsen an den BS30 wirksam kompensiert werden kann. Gruss, Udo2
Udo2 (9.10.2010, 18:28:39)
Der noch beidseitig in die senkrechte Führung integrierte BS15mB hat allgemein auf M-Achsen viel Spiel und ist deshalb für solche auskragenden Führungen ungeeignet …