Training Roboter II
Hochgeladen am 14.5.2011, 20:56 von marspau. 17 / 27
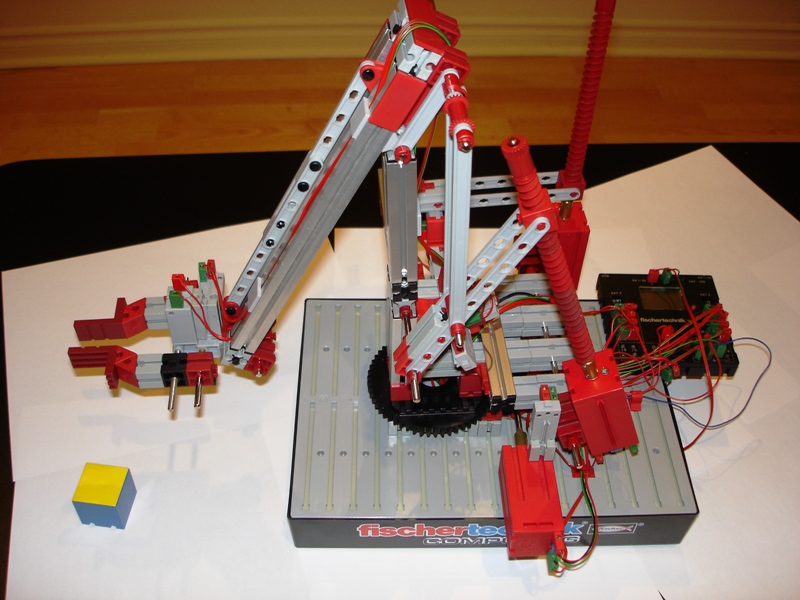
Here is my latest FT project,largely inspired by the original Training roboter 30572. I replaced the original optical readers ( 32357)and the Bar code wheel ( 32367 ),which cannot be use with the TX-C,by the new encoder motors 135484. That was made possible by the use of the TST special colers that allow the use of metal axles with the encoder motors
Translation
Hier ist meine neueste FT Projekt wird weitgehend von der ursprünglichen Ausbildung inspiriert Roboter 30572. Ich ersetzte die ursprüngliche optische Lesegeräte (32.357) und der Bar-Code-Rad (32367), die nicht den Einsatz mit dem TX-C, durch die neuen Encoder-Motoren 135484 werden können. Das war möglich durch die Verwendung des TST besondere colers, die es dem Einsatz von Metall-Achsen mit den Encoder-Motoren
Udo2 (16.5.2011, 20:19:16)
Hallo marspau, mit welchem Steuerprogramm in ROBO Pro wird dein Traning Roboter II nun aktuell bewegt? Oder habe ich das irgendwo übersehen? Gruß, Udo2
marspau (16.5.2011, 21:21:32)
Hello Udo2, I made a Robo Pro program,but it need improvements.The most difficult is the gripper, since i use the original model minimotor,without pulse counting possibility,so I use a timer. An encoder motor at the end of the arm would have been to big and heavy. I will upload the program shortly.Any FT members is welcom to improve it. Grub,Marspau
Hallo UDO2, Ich habe einen Robo Pro Programm, aber es müssen improvements.The schwierigsten ist der Greifer, da ich die ursprüngliche Modell minimotor, ohne Impulszählung Möglichkeit, so verwende ich einen Timer. Ein Encoder Motor am Ende des Arms würde groß und schwer gewesen sein. Ich werde das Programm laden shortly.Any FT Mitglieder welcom zu verbessern. Grub, Marspau