[1/7] 3D-XYZ-G
Hochgeladen am 5.3.2008, 18:08 von Udo2. 1 / 7
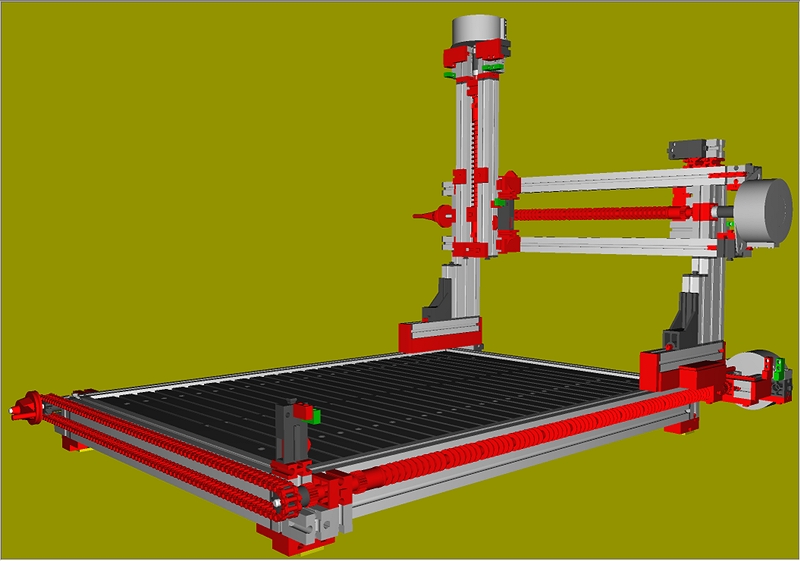
Zweite eigene Neuentwicklung (ft-Neuling seit 12/2006) zum Kennenlernen der Eigenschaften des Bauteils Alu-Profil, vorgestellt vorab als 2D-Kopien des 3D-Fensters der Konstruktionsarbeit. Die Entwicklung hat zum Ziel eine Modellbasis 3D-linear für die Erschließung von Anwendungen inklusive einer Erweiterung mit Drehachsen. Hier das aktuelle Gestell Version 3 mit der Getriebevariante Schrittmotor Übersetzung 1:1 und Schneckentrieb. Der abgebildete Arbeitsstand ist seit 10/2007 aufgebaut und befindet sich mit größeren Unterbrechungen durch Parallelarbeiten an weiteren Modellprojekten in der Beprobung zunächst von Hand. Die Linearwege betragen max. X=335mm, Y=219mm und Z=94mm, die Schrittgröße(rechnerisch) 0,104mm/Schritt und die Lineargeschwindigkeit 5mm/Motorumdrehung. Durch eine Unachtsamkeit hat das Modell auch schon einen Sturz aus 1,50m Höhe von einem Turm Box 1000 hinter sich. Schadenprotokoll: Aufschlag mit der hinteren Außenkante des X-Motors, Zerlegung in den Führungsachsen in 3 Teile, Riß eines BS15 an der Halterung des X-Motors und Abriß eines Schwenkzapfens der X-Schneckenmutter an der Längsseite Ymax, Dejustierung der Parallelität der X-Schlitten 0,5mm. Instandsetzung knapp 30min mit Wechsel des beschädigten BS15, Montage und Justierung.
Eingefügt 08.09.2010: Vorstellung praktischer Modelltest http://www.ftcommunity.de/details.php?image_id=28068#col3
Udo2 (9.11.2009, 23:48:15)
Hallo Der Encodermotor als eine der ft-Neuheiten 2009 macht es mir nun möglich, die Arbeiten an meiner Modellbasis nach 1,5-jähriger Unterbrechnung fortsetzen zu können. Also habe ich den statisch/mechanischen Modellaufbau aus dem Regal geholt. Das Modell ist nun zunächst 4-fach motorisiert. Die 3 Linearachsen wurden mechanisch erfolgreich erprobt und in der Stromaufnahme passend zum ROBO TX Controller eingestellt. Hoffe, dass ich mein 3D-XYZ-GES mit automatischer Steuerung noch 2009 vorstellen kann. Grüsse euch
Udo2 (15.11.2009, 10:32:46)
Hallo Miteinander, nach meinem aktuellen Erkenntnisstand können die Magnet-Encoder des neuen Encodermotors mit ROBO Pro in der erweiterten Motorsteuerung vorläufig nur über das Grundelement 8.1.7 Encodermotor (Level 1) genutzt werden. Ein Speichern und Auslesen von Programmablaufdaten über eine CSV-Liste (XD-Array) ist hiermit noch nicht möglich. Wie sagte doch mal Remadus: “Das kann dauern …” Ob ich da jetzt mal im Forum ft und RoboEntwickler danach fragen sollte? :o) Gruß, Udo2
schnaggels (7.3.2008, 23:00:01)
Ah, das ist also die 3D Konstruktion an der du schon so lange baust :)
Gefällt mir gut, kann mich aber den anderen Kommentaren (ein paar Bilder weiter) nur Anschließen: Wie sind die einzelnen Achsen den (halbwegs) spielfrei gelagert? Rollt das Obergestell oder gleitet es auf dem Alu? Das sind ja genau die Knackpunkte woran es bisher leider allzu oft gescheitert ist…
Wir sind gespannt :)
Gruß, Thomas
Udo2 (7.3.2008, 23:24:03)
Hallo Thomas, “so lange baust” ist nicht ganz zutreffend. Es waren dabei größere Unterbrechungen zeitlich bzw. auch finanziell dabei und die Erschließung der Lösung für die praktische Nutzung ist beinahe “Forschungarbeit”. Schuld daran sind die offensichtlich zahlreichen Kategorien an Toleranzklassen bei den Alu-Profilen. Und bei mir soll oder besser gesagt wird es nicht scheitern! Ich bin auch schon am Überlegen, in welcher Form ich das offenlege ohne daß es ein Buchtext wird. Es könnte aber auch sein, daß die langjährigen ft-Spezialisten unter uns davon distanziert bleiben. Du hast aber sicher hier gelesen, welche Zwischenerkenntnisse oder Ideen hinsichtlich Linienauflösung bzw. Liniendicke dennoch schon gewonnen werden konnten. Gruß Ingo