Fischertechnik-Smartbird-Earth-Flight
Hochgeladen am 5.1.2013, 18:08 von peterholland. 17 / 29
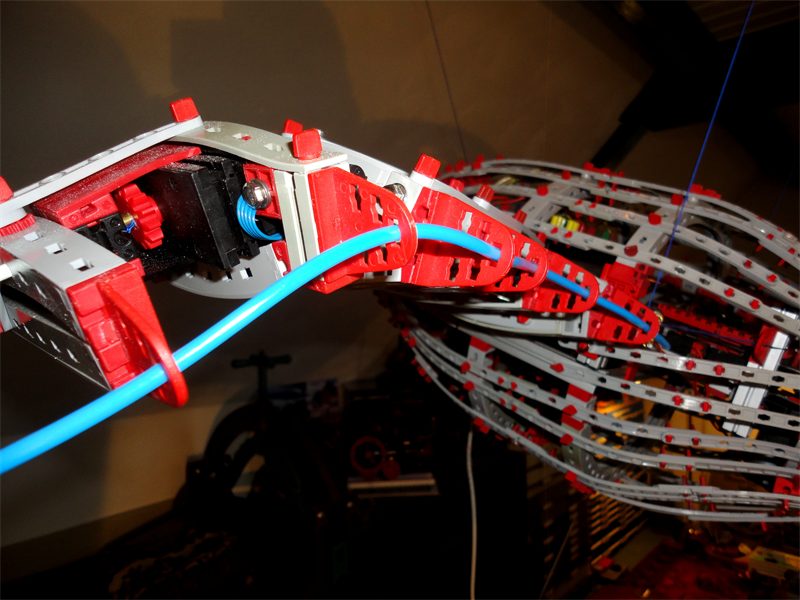
De Robo Interface gebruik ik uitsluitend en alleen voor de bediening van de 2 FT-Servo-motoren ten behoeve van verdraaiing van de “eindvleugels”. Voor herkenning van de 0-Boven-Positie van de centrale vleugelaandrijving gebruik ik schakelaar I-1. Voor de Positie-herkenning van de centrale vleugelaandrijving gebruik ik Pulsteller I-2.
Vanwege de potmeter-weerstandverschillen en om kapotdraaien te voorkomen, stuur ik elke FT-Servo apart aan met een max. snelheidswaarde 4. Om de zaak “eenvoudig” te houden laat ik elke FT-Servo volledig in de uiterste posities bewegen.
De Festo-Smartbird, die ook daadwerkelijk zelf kan vliegen, regelt ook de tussen-eindvleugel-posities afhankelijk van o.a. het toerental van de centrale vleugelaandrijving en de gewenste vlucht.