Hauptkomponenten
Hochgeladen am 22.5.2016, 21:51 von NBGer. 2 / 2
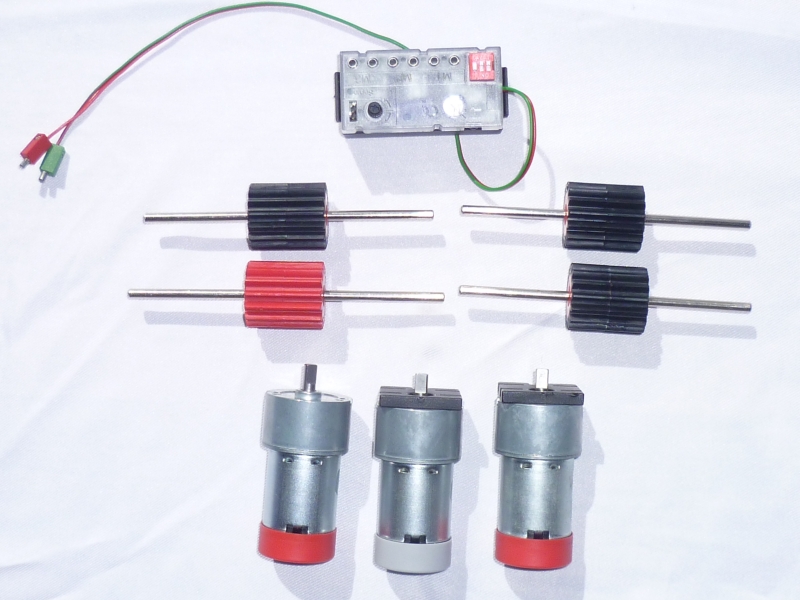
Das sind die wichtigsten Komponenten. Dazu kommen dann “nur noch” Zahnräder, Achsen und diverse Bausteine. Angetrieben wird das Ganze über 3 Motoren und gesteuert über eine Remote-Control. Die Motoren sind jetzt nur exemplarisch. Die optimalen Übersetzungen weiß ich selbst noch nicht.. Es wird kein Controller benötigt und es muß nichts programmiert werden. Im Grossen und Ganzen eine rein mechanische Lösung
H.A.R.R.Y. (23.5.2016, 08:00:52)
Auch wenn die Motoren schon als “exemplarisch” angesprochen werden. Ob der IR-Controller PMs schafft, und dann noch gleich 3 Stück, wage ich mal zu bezweifeln.
Ansonsten tippe ich auf eine Art CVT mit mehreren Fahrstufen. Alle Motore sind gleichzeitig im Eingriff und die Leistung wird über die Differentiale kombiniert. Gleichlauf ist eventuell auch noch mit dabei. Eine Art Panzer mit 2 Gängen?
NBGer (23.5.2016, 08:33:44)
Hallo Harry, Strombegrenzung, Drehmoment, Schlupf….das sind so generelle Probleme, mit denen man sich bei fischertechnik rumschlagen muß….kann natürlich sein, daß es am Ende an so etwas scheitert. Das mit mehreren Fahrstufen ist ne interessante Idee! Braucht man mehr Leistung/Drehmoment, wird ein weiterer Motor bestromt. Sollte man mal ausprobieren!
Aber in diese Richtung geht es nicht. Und es wird kein Panzer und auch kein Raupenfahrzeug im Allgemeinen!
H.A.R.R.Y. (24.5.2016, 10:55:51)
Gehe ich recht in der Annahme, daß es ein mobiles Modell ist? Irgendetwas was läuft vielleicht?
NBGer (24.5.2016, 12:09:07)
ja klar ist es etwas Mobiles! Ist ja eine Remote Control auf dem Bild. und…es fährt! Bis zum Wochenende habe ich wahrscheinlich das Getriebe zusammengebaut. Dann gibt es ein neues Bild